5-12 Determining Basic Drive Configuration SYNAX200
DOK-SYNAX*-SY*-07VRS**-PR01-EN-P
Drive with Direct Incremental Position Detection
• no gear between motor and cylinder
• high level of precision can be achieved
• load angle directly determined via incremental external encoder
• gear error statically compensated
• With MHD, MKE, MKD and MBS motors:
- motor encoder for commutation is needed
- absolute position detection via motor encoder
• With MBW, 1MB, 2AD and ADF motors:
- no separate motor encoder
- no absolute position detection
• With MBW and 1MB motors:
- rigid coupling between motor and cylinder, resulting in
highest level of static and dynamic stiffness
Usable Motors DKR:
• MBW (without motor encoder)
• 1MB (without motor encoder)
• 2AD (without motor encoder)
• ADF (without motor encoder)
• MBS (only in connection with motor encoder)
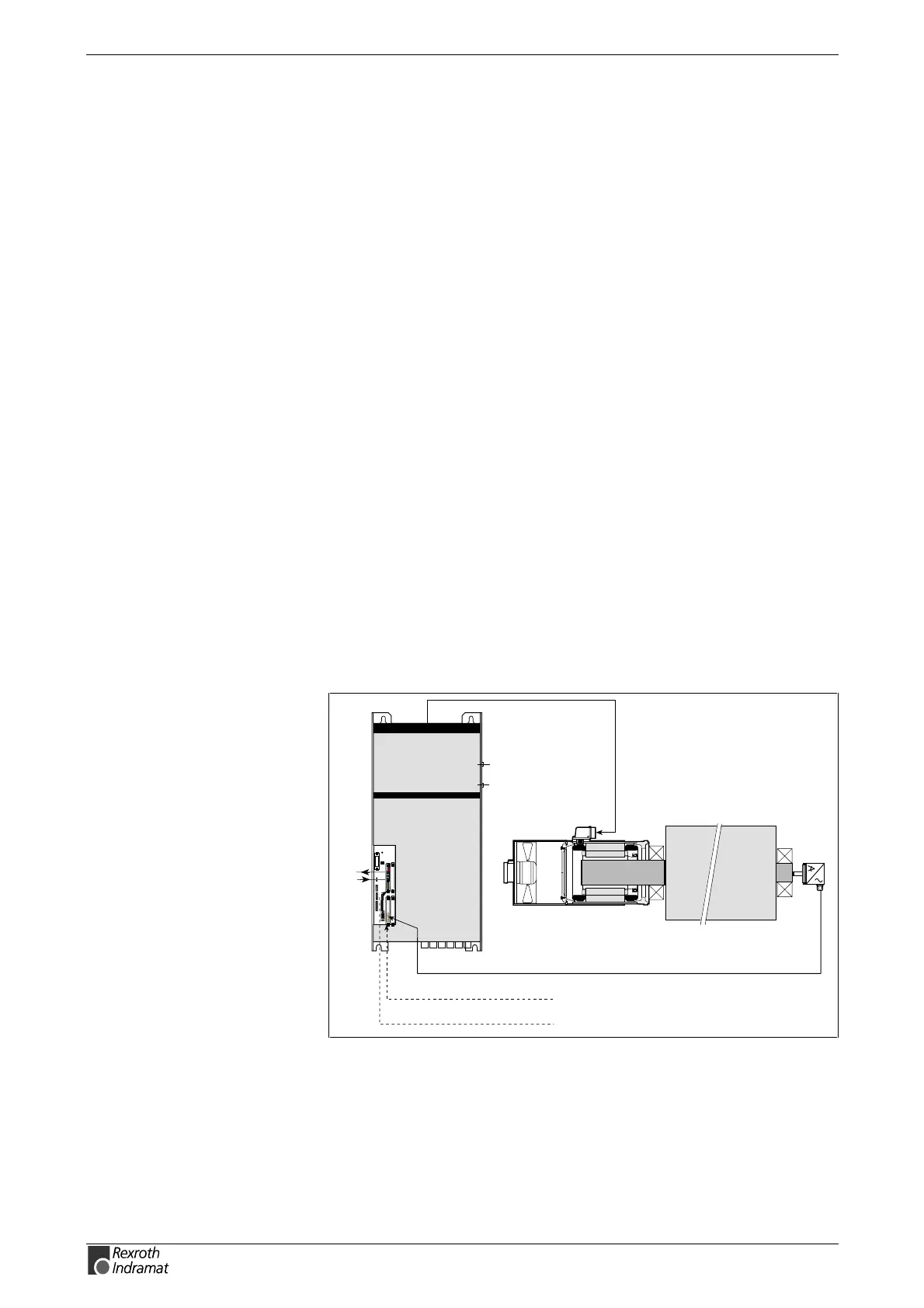
Basic Drive Configuration BE32 (DKR)
SY7PR006.FH7
MBW
2AD
ADF
1MB
LWL
U1 (DSS)
U2 (DLF)
IKS 349
DIGITAL COMPACT CONTROLLER
DKR 4
H1
X4
X2
U5
U2
S2
U4
U1 U3
X9
1
6
1
7
X8
H2
S1
X3
X7
1
10
1
11
X3
external
incremental encoder
with sine output
e.g., Heidenhain
ROD 481
ERN 180
ERN 680
RON 285
Fig. 5-13: Drive with MBW, 2AD or 1MB motor with direct incremental position
detection
Features:
MBW, 2AD, ADF, 1MB: