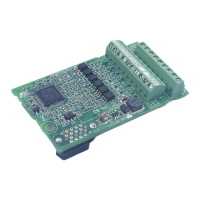
Accelerates to
lower limit
Output frequency
upper limit
Lower limit
FWD run/stop
Up command
Down command
Power supply
Same
frequency
d4-01 = 1
d4-01 = 0
ON
ON
ON
ON
ON
Hold
frequency
reset
Figure 5.39 Up/Down Command Operation
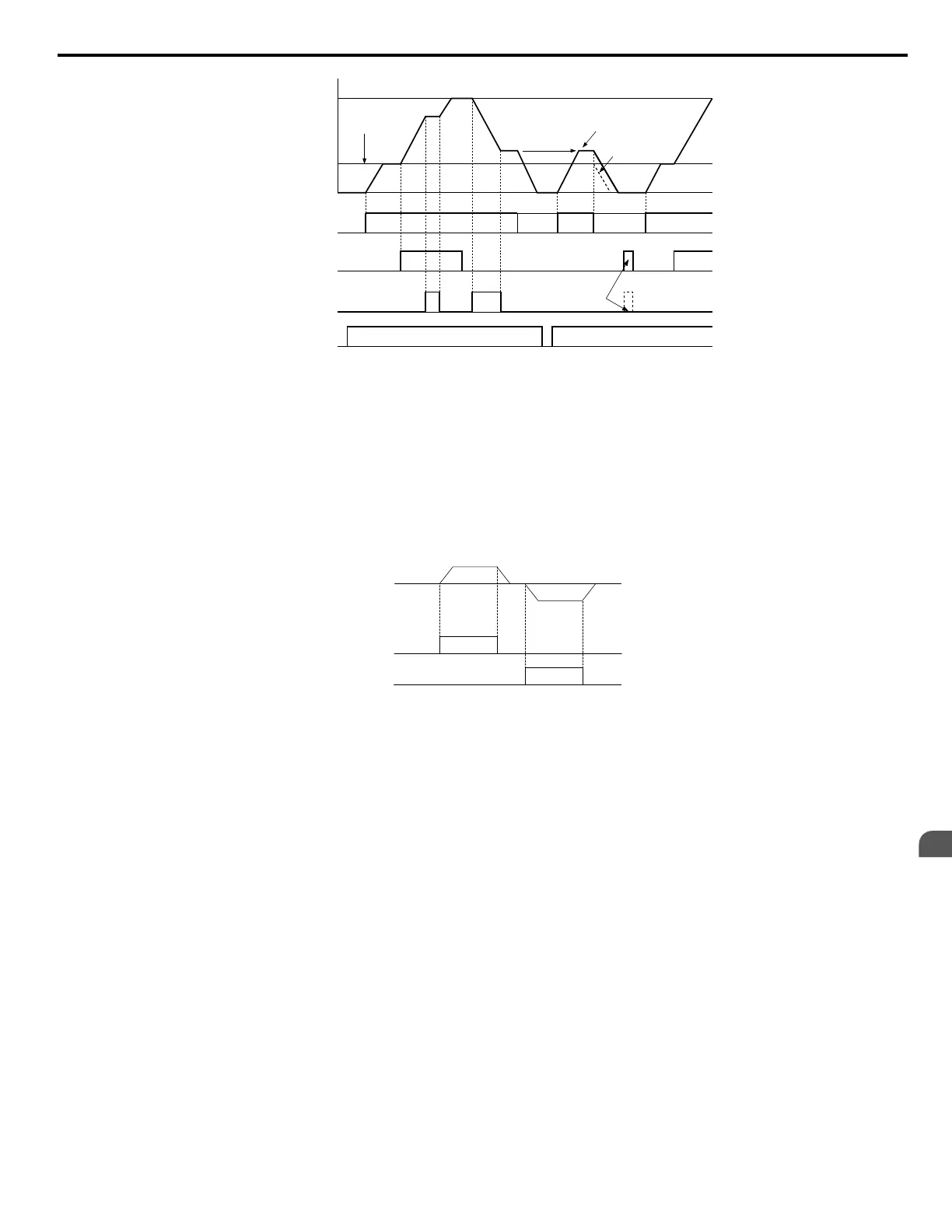
Setting 12, 13: Forward Jog, Reverse Jog
Digital inputs programmed as Forward Jog (H1-oo = 12) and Reverse Jog (H1-oo = 13) will be Jog inputs that do not
require a Run command. Closing the terminal set for Forward Jog input will cause the drive to ramp to the Jog frequency
reference (d1-17) in the forward direction. The Reverse Jog will cause the same action in the reverse direction. The Forward
Jog and Reverse Jog command can be set independently.
Note: The Forward Jog and Reverse Jog commands override all other frequency references. However, if the drive is set to prohibit reverse rotation
(b1-04 = 1), activating Reverse Jog will have no effect. Inputting both the Forward Jog and Reverse Jog are simultaneously for 500 ms or
longer will trigger an alarm will and the drive will ramp to stop.
d1-17
ON
Output
Frequency
FJOG
d1-17
ON
RJOG
Figure 5.40 FJOG/RJOG Operation
Setting 14: Fault Reset
When the drive detects a fault condition, the fault output contact closes, the drive output shuts off, and the motor coasts to
stop (specific stopping methods can be selected for some faults such as L1-04 for motor overheat). After removing the Run
command, clear the fault either by pressing the RESET key on the digital operator or closing a digital input configured as a
Fault Reset (H1-oo = 14).
Note: Remove the Run command prior to resetting a fault. Fault Reset commands are ignored while the Run command is present.
Setting 15, 17: Fast Stop (N.O., N.C.)
The Fast Stop function operates similar to an emergency stop input to the drive. If a Fast Stop command is input while the
drive is running, the drive decelerates to a stop in the deceleration time set to C1-09 (Refer to C1-09: Fast Stop Time on page
178). The drive can only be restarted after bringing the drive to a complete stop, turning off the Fast Stop input, and switching
off the Run command.
•
To trigger the Fast Stop function with an N.O. switch, set H1-oo = 15.
•
To trigger the Fast Stop function with an N.C. switch, set H1-oo = 17.
Figure 5.41 shows an operation example of Fast Stop.
5.7 H: Terminal Functions
YASKAWA SIEP YAIP1U 01C AC Drive - P1000 Technical Manual
209
5
Parameter Details

 Loading...
Loading...