n
L5-02: Auto Restart Fault Output Operation Selection
Determines if a fault output is triggered (H2-oo = E) when the drive attempts to restart.
No. Name Setting Range Default
L5-02 Auto Restart Fault Output Operation Selection 0, 1 0
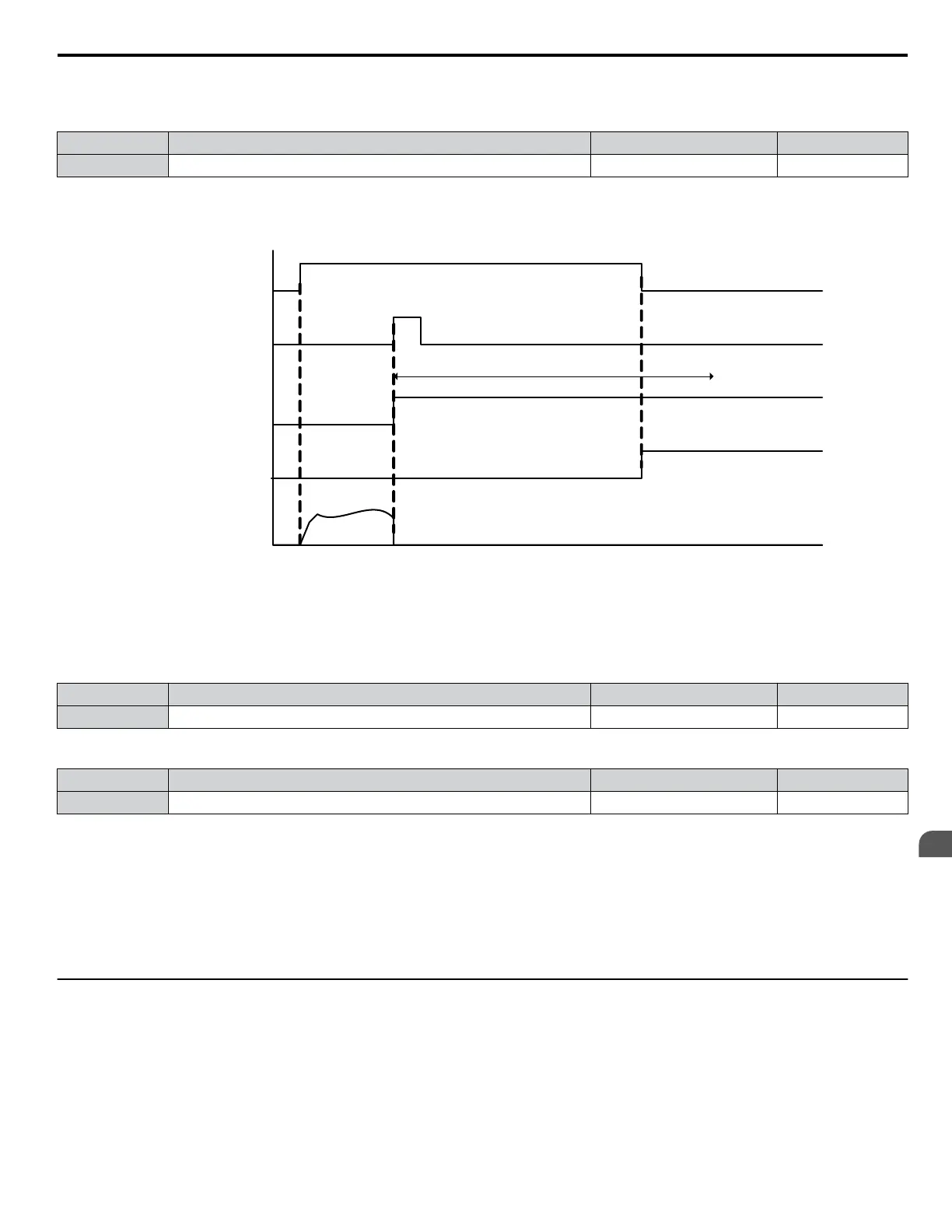
Setting 0: No Fault Output
Auto-Restart - Cancel Early
Fault output disabled (L5-02 = 0)
Run command
Fault condition
Fault display
Fault digital output
Output Frequency
(U1-02)
L5-04
Figure 5.81 Auto Restart Cancel Early
Setting 1: Fault Output Is Set
n
L5-04: Fault Reset Interval Time
Determines the amount of time to wait between restart attempts when parameter L5-05 is set to 1.
No. Name Setting Range Default
L5-04 Fault Reset Interval Time 0.5 to 600.0 s 10.0 s
n
L5-05: Fault Reset Operation Selection
No. Name Setting Range Default
L5-05 Fault Reset Operation Selection 0, 1 0
Setting 0: Count Successful Restarts
The drive will continuously attempt to restart. If it restarts successfully, the restart counter is increased. This operation is
repeated each time a fault occurs until the counter reaches the value set to L5-01.
Setting 1: Count Restart Attempts
The drive will attempt to restart using the time interval set to parameter L5-04. A record is kept of the number of attempts to
restart to the drive, regardless of whether those attempts were successful. When the number of attempted restarts exceeds the
value set to L5-01, the drive stops attempting to restart.
u
L6: Torque Detection
The drive provides two independent torque detection functions that trigger an alarm or fault signal when the load is too heavy
(oL), or suddenly drops (UL). These functions are set up using the L6-oo parameters. Program the digital outputs as shown
below to indicate the underload or overload condition to an external device:
Note: When overtorque occurs in the application, the drive may stop due to overcurrent (oC) or overload (oL1). To prevent the drive from stopping,
use torque detection to indicate an overload situation to the controller before oC or oL1 occur. Use undertorque detection to discover
application problems like a torn belt, a pump shutting off, or other similar trouble.
5.8 L: Protection Functions
YASKAWA SIEP YAIP1U 01C AC Drive - P1000 Technical Manual
255
5
Parameter Details

 Loading...
Loading...