5-23
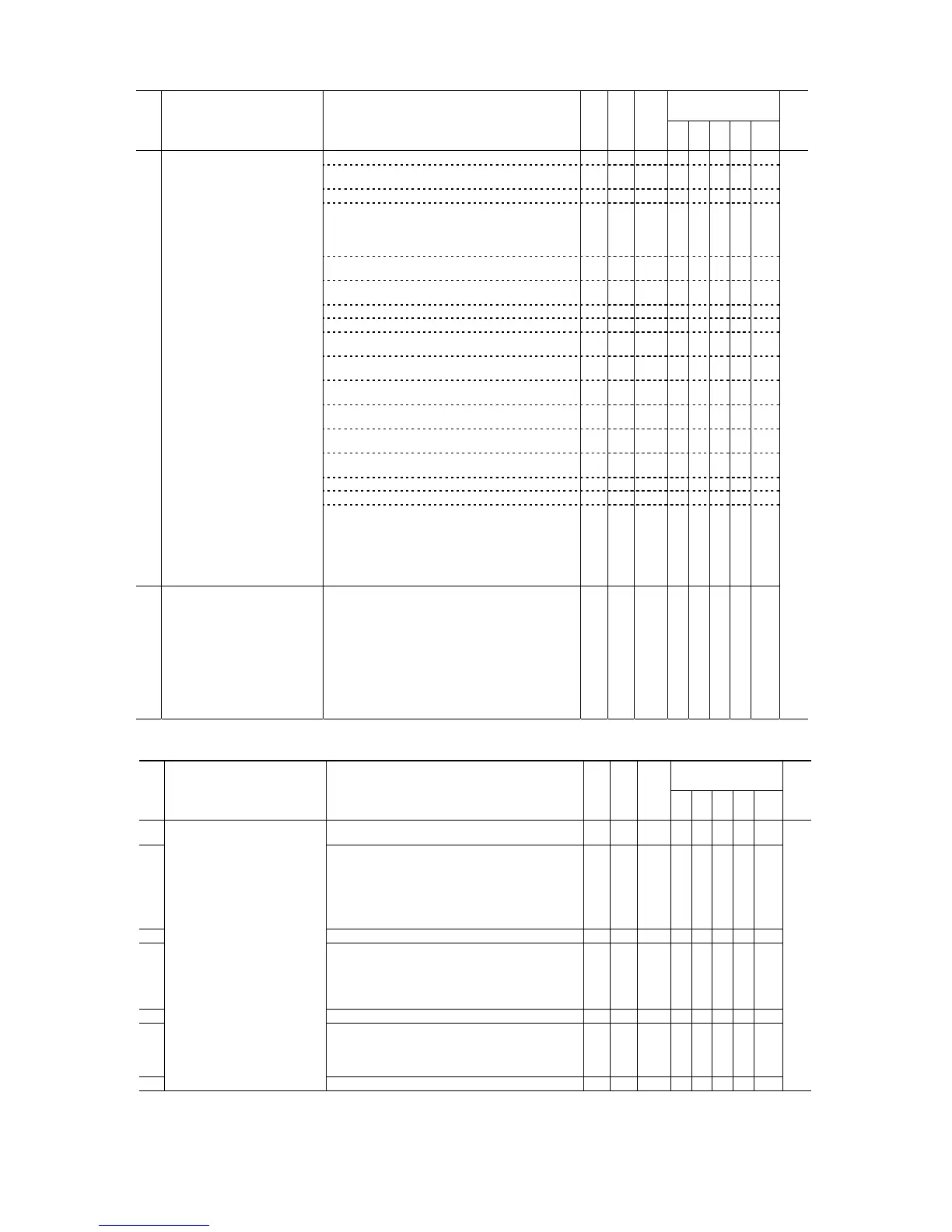
Drive control
Code Name Data setting range
Change when
running
Data copying
Default
setting
V/f
PG
V/f
w/o
PG
w/
PG
Torq ue
Refer
to
page:
32 (1032): Pre-excitation (EXITE) N N Y Y N 5-139
33 (1033): Reset PID integral and differential
components (PID-RST)
Y
Y
Y
Y
N
34 (1034): Hold PID integral component (PID-HLD) Y Y Y Y N
35 (1035): Select local (keypad) operation (LOC) Y Y Y Y Y
36 (1036): Select motor 3 (M3) Y Y Y Y Y
37 (1037): Select motor 4 (M4) Y Y Y Y Y
39: Protect motor from dew condensation (DWP) Y Y Y Y Y
40: Enable integrated sequence to switch
to commercial power (50 Hz) (ISW50)
Y
Y
N
N
N
41: Enable integrated sequence to switch
to commercial power (60 Hz) (ISW60)
Y
Y
N
N
N
47 (1047): Servo-lock command (LOCK) N N N Y N
49 (1049): Pulse train sign (SIGN) Y Y Y Y Y
70 (1070): Cancel constant peripheral speed
control (Hz/LSC)
Y
Y
Y
Y
N
71 (1071): Hold the constant peripheral speed
control frequency in the memory (LSC-HLD)
Y
Y
Y
Y
N
72 (1072): Count the run time of commercial
power-driven motor 1 (CRUN-M1)
Y
Y
N
N
Y
73 (1073): Count the run time of commercial
power-driven motor 2 (CRUN-M2)
Y
Y
N
N
Y
74 (1074): Count the run time of commercial
power-driven motor 3 (CRUN-M3)
Y
Y
N
N
Y
75 (1075): Count the run time of commercial
power-driven motor 4 (CRUN-M4)
Y
Y
N
N
Y
76 (1076): Select droop control (DROOP) Y Y Y Y N
77 (1077): Cancel PG alarm (PG-CCL) N Y N Y Y
81 (1081): Clear all customizable logic timers (CLTC) Y Y Y Y Y
98: Run forward (FWD) Y Y Y Y Y
99: Run reverse (REV) Y Y Y Y Y
100: No function assigned (NONE)
Setting the value of 1000s in parentheses ( ) shown above
assigns a negative logic input to a terminal.
Y Y Y Y Y
U91 Customizable Logic Timer Monitor
(Step selection)
1: Step 1
2: Step 2
3: Step 3
4: Step 4
5: Step 5
6: Step 6
7: Step 7
8: Step 8
9: Step 9
10: Step 10
N Y 1 Y Y Y Y Y
y codes: LINK Functions
Drive control
Code Name Data setting range
Change when
running
Data copying
Default
setting
V/f
PG
V/f
w/o
PG
w/
PG
Torque
control
Refer
to
page:
y01 RS-485 Communication 1
(Station address)
1 to 255 N Y 1 Y Y Y Y Y 5-147
y02 (Communications error processing) 0: Immediately trip with alarm
er8
1: Trip with alarm
er8
after running for the period specified
by timer y03
2: Retry during the period specified by timer y03. If the retry
fails, trip with alarm
er8
.
If it succeeds, continue to run.
3: Continue to run
Y Y 0 Y Y Y Y Y
y03 (Timer) 0.0 to 60.0 s Y Y 2.0 Y Y Y Y Y
y04 (Baud rate) 0: 2400 bps
1: 4800 bps
2: 9600 bps
3: 19200 bps
4: 38400 bps
Y Y 3 Y Y Y Y Y
y05 (Data length) 0: 8 bits 1: 7 bits Y Y 0 Y Y Y Y Y
y06 (Parity check) 0: None (2 stop bits)
1: Even parity (1 stop bit)
2: Odd parity (1 stop bit)
3: None (1 stop bit)
Y Y 0 Y Y Y Y Y
y07 (Stop bits) 0: 2 bits 1: 1 bit Y Y 0 Y Y Y Y Y