4.4.1 Network Management Objects (NMT)
The NMT telegram looks like this:
The drive supports the following network management functions:
cs = 129, reset node: causes a cold-start of the drive. This deletes all para-
meters saved in the RAM and loads the values stored
in the EEPROM.
cs = 130, reset communication node: causes a stop of PDO-communication, gives a new
bootup-message
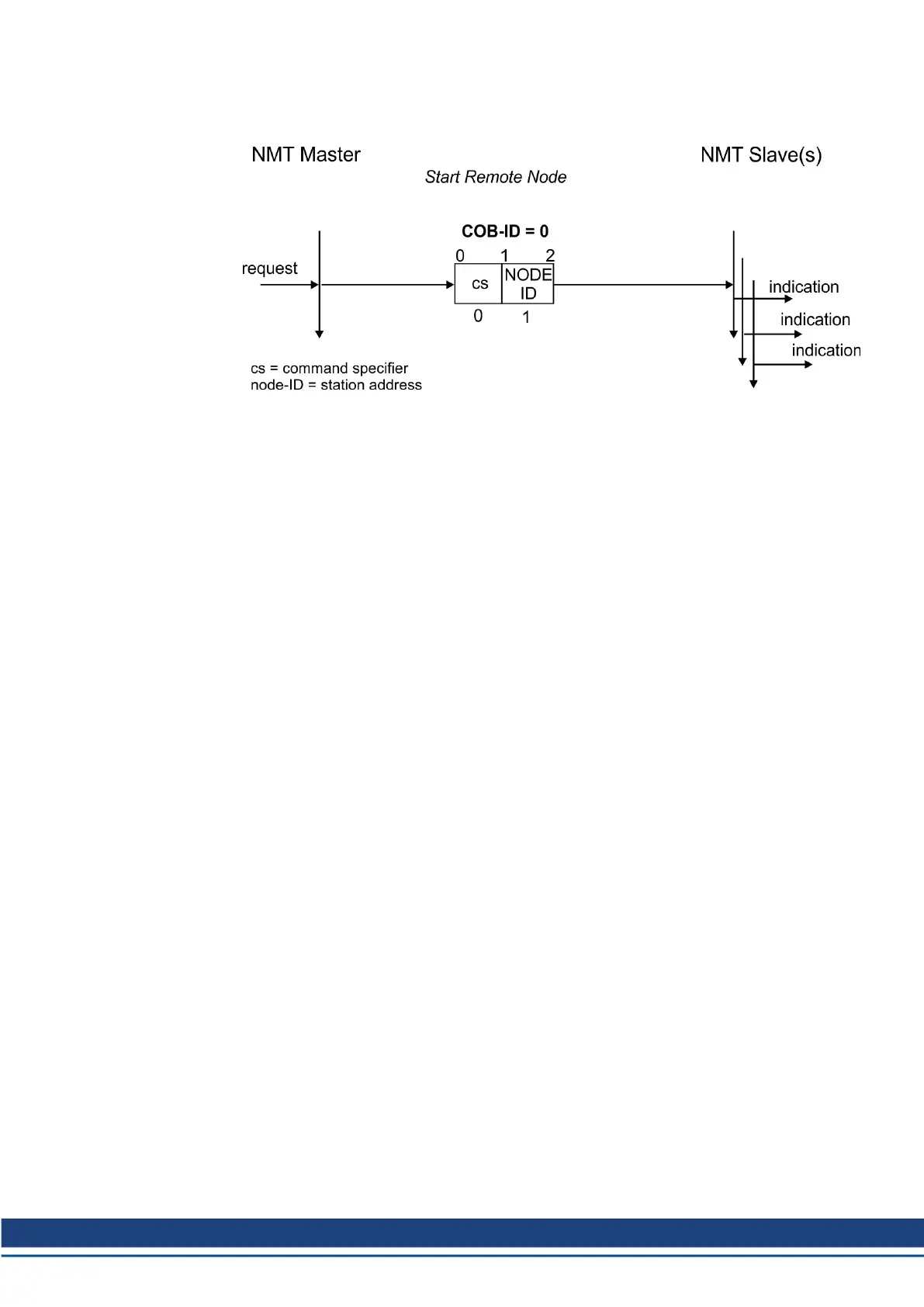
cs = 1, start remote node: starts the CAN node. I.e. the PDOs of the drive are
enabled for operation. From this moment, transmit-
PDOs will be transmitted under eventcontrol, and cyc-
lical process data operation can commence.
cs = 2, stop remote node: stops the CAN node, I.e. the drive no longer responds
to any received PDOs or transmits any PDOs.
4.4.2 Synchronization Object (SYNC)
The SYNC object usually is used as a periodic Broadcast Object and provides the basic clock for
the bus. SYNC has a high priority, to ensure constant time intervals. The usage of this protocol is
explained in the appendix from page (➜ # 117). You can use the SYNC object to start motion task
of several axes simultaneously for example.
4.4.3 Time-Stamp Object (TIME)
This communication object is not supported by S300/S700.
4.4.4 Emergency Object (EMCY)
EMCY is event-triggered and generated by an internal fault/error situation. This object is trans-
mitted afresh for every error. Since the error codes are device-dependent, they are described in
the Chapter CANopen Drive Profile (➜ # 27). The last 8 Emergency error codes can be read via
object 1003.
S300-S700 CANopen | 4 CANopen Communciation Profile
Kollmorgen | kdn.kollmorgen.com | December 2019 19

 Loading...
Loading...








