S300-S700 CANopen | 4 CANopen Communciation Profile
4.2 Construction of the Communication Object Identifier (COB-ID)
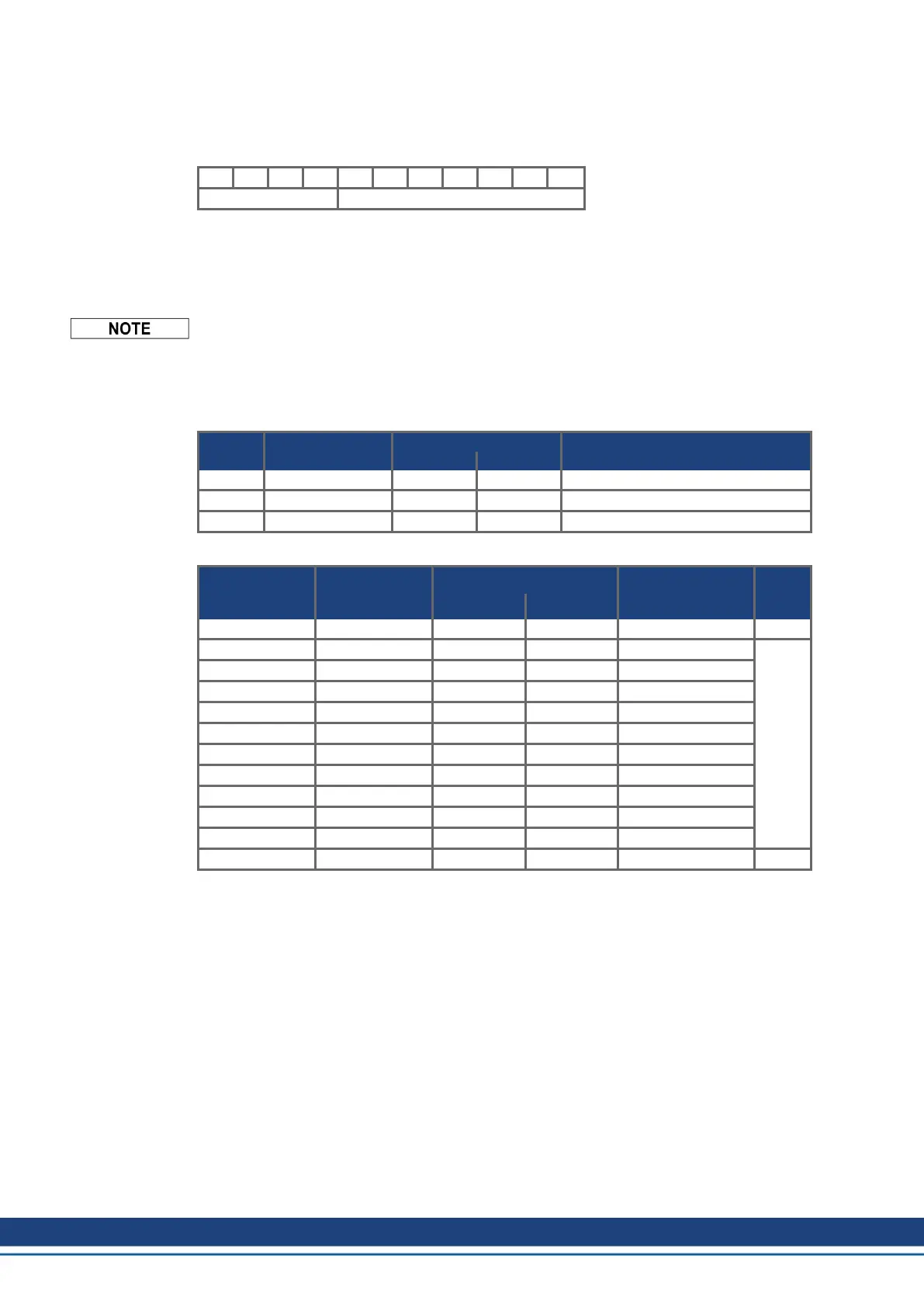
The following diagram shows the layout of the COB Identifier (COB-ID). The Function Code
defines the interpretation and priority of the particular object.
10 9 8 7 6 5 4 3 2 1 0
Function-Code Module-ID
Bit 0 .. 6:
Module ID (servo amplifier's CAN-bus address, range 1 ... 127; is set up in the setup software or
the servo amplifier (➜ # 13).
Bit 7... 10:
Function Code (number of the communication object that is defined in the server)
If an invalid station number (=0 or >127) is set, then the module will be set internally to 1.
The following tables show the default values for the COB Identifier after switching on the servo
amplifier. The objects, which are provided with an index (Communication Parameters at Index),
can have a new ID assigned after the initialization phase. The indices in brackets are optional.
Predefined broadcast objects (send to all nodes):
Object Function code
(binary)
Resulting COB-IDs Communication parameters
at index
Dec. Hex.
NMT 0000 0 0h —
SYNC 0001 128 80h (1005h)
TIME 0010 256 100h not supported
Predefined Peer-to-Peer objects (node sends to node):
Object Function code
(binary)
Resulting COB-IDs Communication
parameters
at index
Piority
Dec. Hex.
EMERGENCY 0001 129..255 81h..FFh — high
TPDO 1 0011 385..511 181h..1FFh 1800h
↓
RPDO 1 0100 513..639 201h..27Fh 1400h
TPDO 2 0101 641..767 281h..2FFh 1801h
RPDO 2 0110 769..895 301h..37Fh 1401h
TPDO 3 0110 897..1023 381h..3FFh 1802h
RPDO 3 1000 1025..1151 401h..47Fh 1402h
TPDO 4 1001 1153..1279 481h..4FFh 1803h
RPDO 4 1010 1281..1407 501h..57Fh 1403h
SDO (tx*) 1011 1409..1535 581h..5FFh
SDO (rx*) 1100 1537..1663 601h..67Fh
Nodeguard 1110 1793..1919 701h..77Fh (100Eh) low
*tx = direction of transmission: S300/S700 → Master
rx = direction of transmission: Master → S300/S700
16 Kollmorgen | kdn.kollmorgen.com | December 2019

 Loading...
Loading...








