S300-S700 CANopen | 5 CANopen Drive Profile
5.11.5 Functional Description
Two different ways to apply target positions to a drive are supported by this device profile.
Set of setpoints:
After reaching the target_position, the drive device immediately processes the next target position,
which results in a move where the velocity of the drive normally is not reduced to zero after achiev-
ing a setpoint. With S300/S700, this is only possible if trapezoidal ramps are used.
Single setpoints:
After reaching the target_position, the drive device signals this status to a host computer and then
receives a new setpoint. After reaching a target_position, the velocity is normally reduced to zero
before starting a move to the next setpoint.
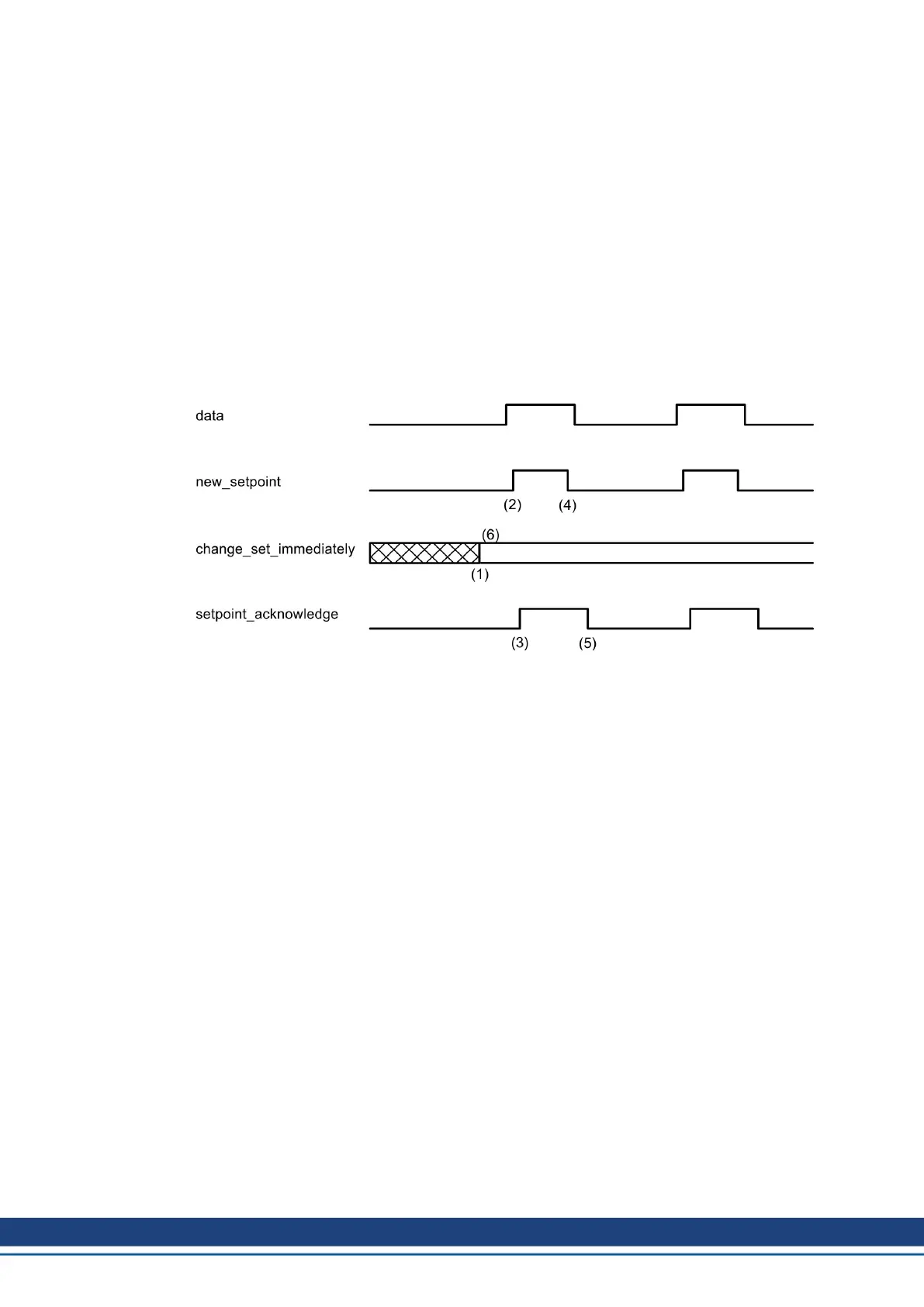
The two modes are controlled by the timing of the bits for new_setpoint and change_set_imme-
diately in the control word, and setpoint_acknowledge in the status word. These bits allow the set-
ting up of a request-response mechanism in order to prepare a set of setpoints while another set
is still being processed in the drive unit. This minimizes reaction times within a control program on
a host computer.
The figures show the difference between the set_of_setpoints mode and the single setpoint mode.
The initial status of the bit change_set_immediately in the control word determines which mode is
used. To keep these examples simple, only trapezoidal moves are used.
90 Kollmorgen | kdn.kollmorgen.com | December 2019

 Loading...
Loading...








