S300-S700 CANopen | 5 CANopen Drive Profile
Description of the homing methods
Choosing a homing method by writing a value to homing method (Object 6098h) will clearly estab-
lish:
the homing signal (P-Stop, N-Stop, reference switch)
the direction of actuation
and where appropriate
the position of the index pulse.
The reference position is give by the reference offset (Object 607Ch). The manufacturer specific
parameter ENCZERO (Object 3537h, Subindex 01h) can be used to adapt the initial position of
the motor for homing to match the index pulse for homing with zeroing.
A detailed description of the types of homing movement can be found in the description of the
setup software DriveGUI.exe.
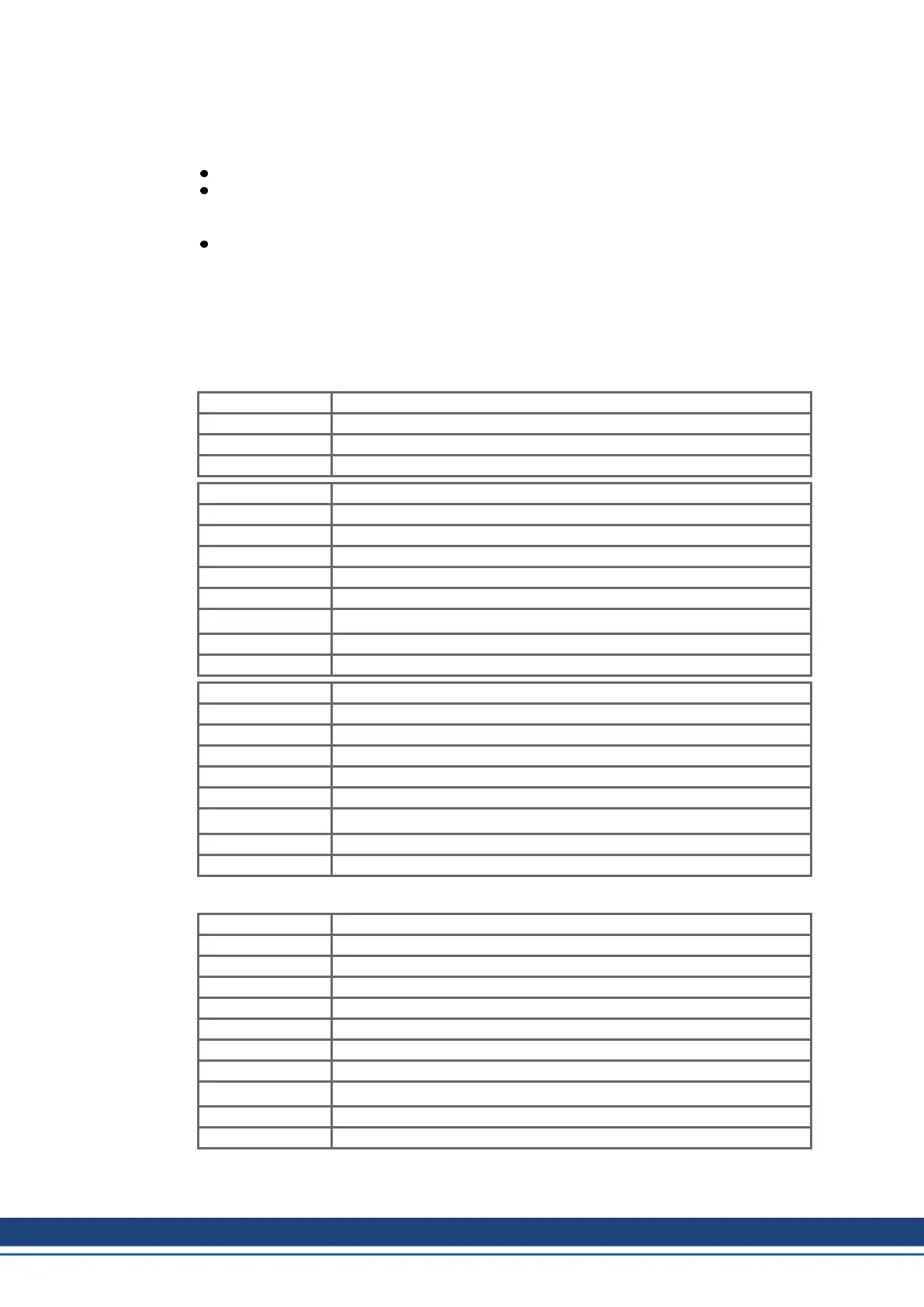
5.10.4.3 Object 6099h: Homing speeds (DS402)
Index 6099h
Name homing speeds
Object code ARRAY
Data type UNSIGNED32
Subindex 1
Description speed during search for switch
Mode hm
Access rw
PDO mapping possible
Unit velocity units
Value range 0 to (2
32
-1)
Default value equivalent 60 rpm
EEPROM yes
Subindex 2
Description speed during search for zero
Mode hm
Access rw
PDO mapping not possible
Unit velocity units
Value range 0 to (2
32
-1)
Default value 1/8 * Object 6099 sub 1
EEPROM yes
5.10.4.4 Object 609Ah: Homing acceleration (DS402)
Index 609Ah
Name homing acceleration
Object code VAR
Data type UNSIGNED32
Mode hm
Access rw
PDO mapping possible
Unit acceleration units
Value range 0 to (2
32
-1)
Default value 0
EEPROM yes
84 Kollmorgen | kdn.kollmorgen.com | December 2019

 Loading...
Loading...








