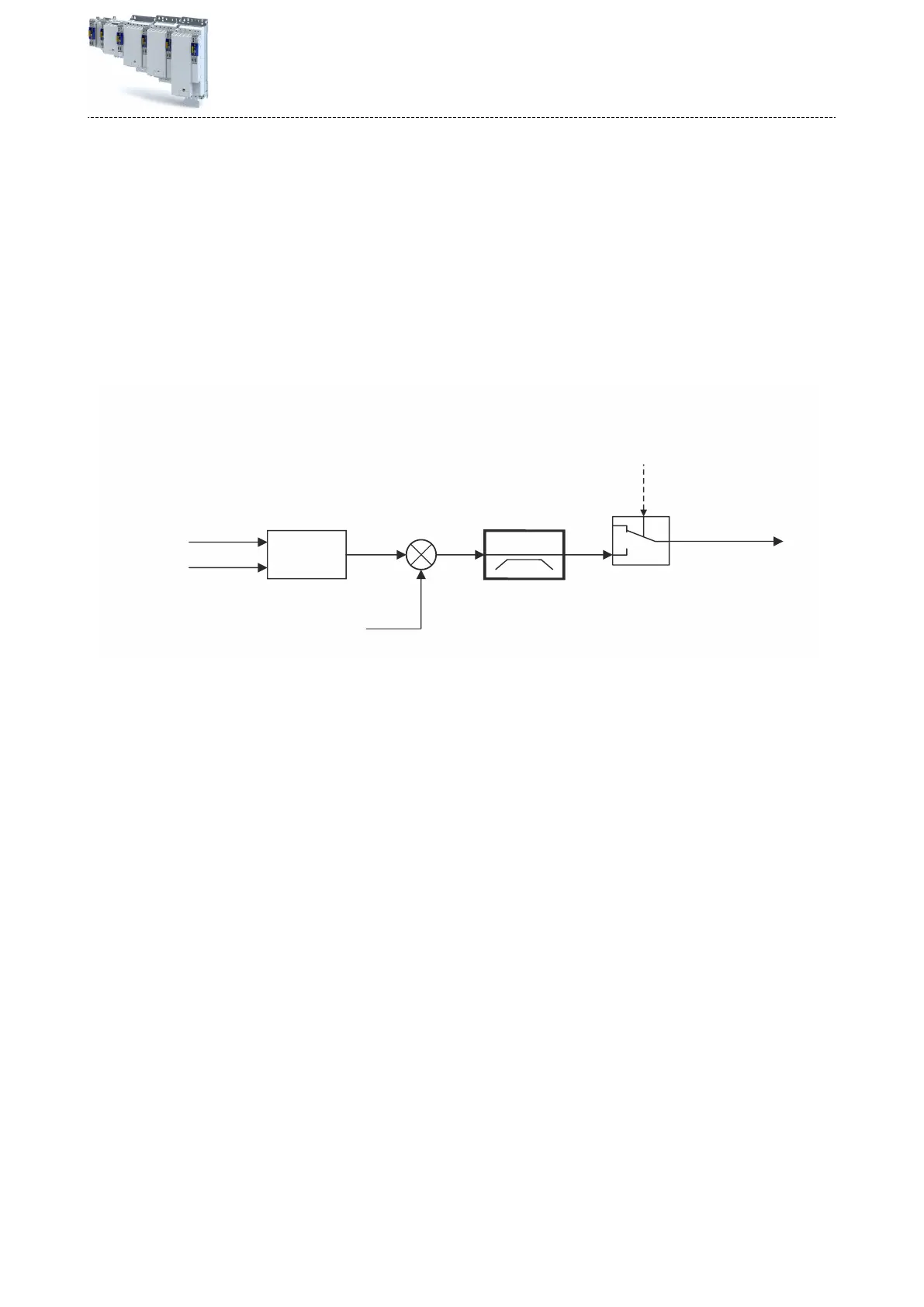
7.13 Adapng the speed controller gain
If the motor and the reel is considered a single system with a rigid mass, the gain of the speed
c
ontroller will be directly proporonal to the moment of inera. During the winding process,
the moment of inera changes. The gain adjustment is required in order to adjust the gain of
the speed controller to the moment of inera.
In correspondence with the selected method, an adjustment factor is calculated based on
either the current diameter or the moment of inera. The adjustment factor is used to per-
form a mulplicave evaluaon of the gain factor for the speed controller. The congured
gain only has an eect at maximum diameter or maximum moment of inera. The gain in the
motor control is evaluated in the parameter Speed controller sengs: Gain. It is only when
the factor is 100 [%] that the value from the parameter Speed controller sengs: Gain is
eecve. 40x2900:001
C = f(d,d²,J)v
P
Max. moment of inertia
d
Constant moment of inertia
0x5050:010 Bit 29
Act. SpdCtrl gain factor
0x5051:032
100 %
0x5051:111
Enable speed control gain adapt
0x5051:112
Actual moment of inertia
0x5051:110
Actual diameter
0x5051:096
J
Adapt.of SpdCtrl gain factor
0x5051:029
Mode of Speed ctrl adapt
0x5051:030
Low.limit SpdCtrl gain fact
0x5051:031
Fig. 55: Dialogue overview "Speed controller gain"
Conguring the "Winder Dancer" TA
Adapng the speed controller gain
139

 Loading...
Loading...









