10. Safety-related functions and interfaces
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 112
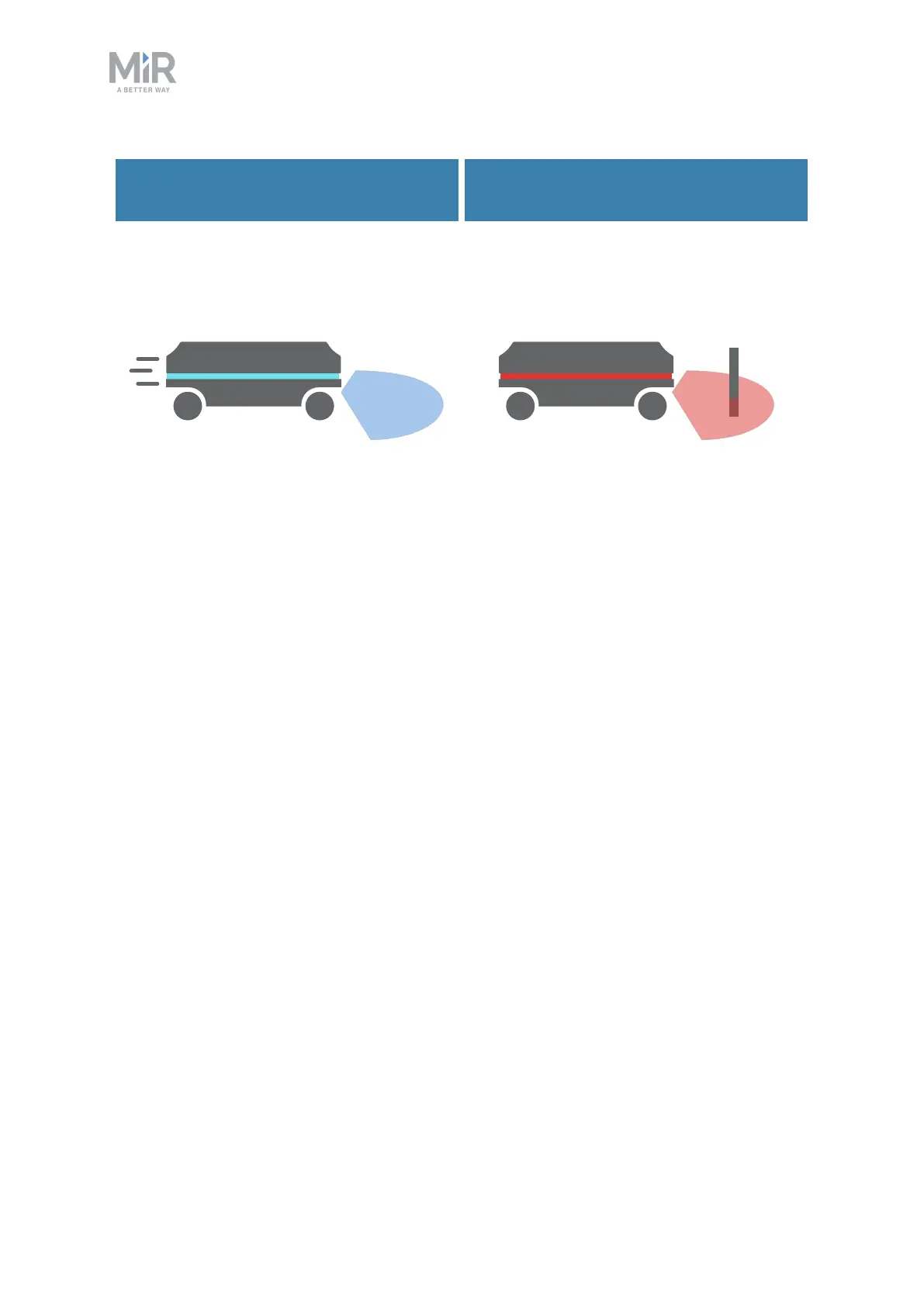
Drives when the area is clear
Stops when an obstacle is
detected
Figure 10.4. Personnel detection ensures that the robot drives when its path is clear and stops if
an obstacle is detected within its Protective field.
The safety laser scanners are programmed with two sets of Protective fields.One
field set is used when the robot is driving forward and the other when it is driving
backward. The Protective field sets are part of the robot’s Personnel detection
safety function. Each Protective field in the sets is an individually configured
contour around the robot. The robot activates the correct field based on the
speed. If a person or object is detected within the active Protective field, the
robot enters Protective stop until the Protective field is cleared of obstacles for at
least two seconds.
The tables in the following sections show the sizes of the Protective fields at given
speeds. The faster the robot moves, the larger the scanners' field is. The speed of
the robot is determined based on the encoder data.