12. Usage
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 193
12. Usage
The main way to use MiR1350 is through missions that you create.
In the following sections you will find practical examples of how missions can be
tailored to different tasks. The examples include:
•
Setting markers and positions on the map.
•
Creating a mission that uses a Prompt user action. The example mission is
titled Prompt user.
•
Creating a mission that uses a Try/Catch action. The example mission is titled
Try/Catch.
•
Creating a mission that uses variables.The example mission is titled Variable
docking.
12.1 Creating markers
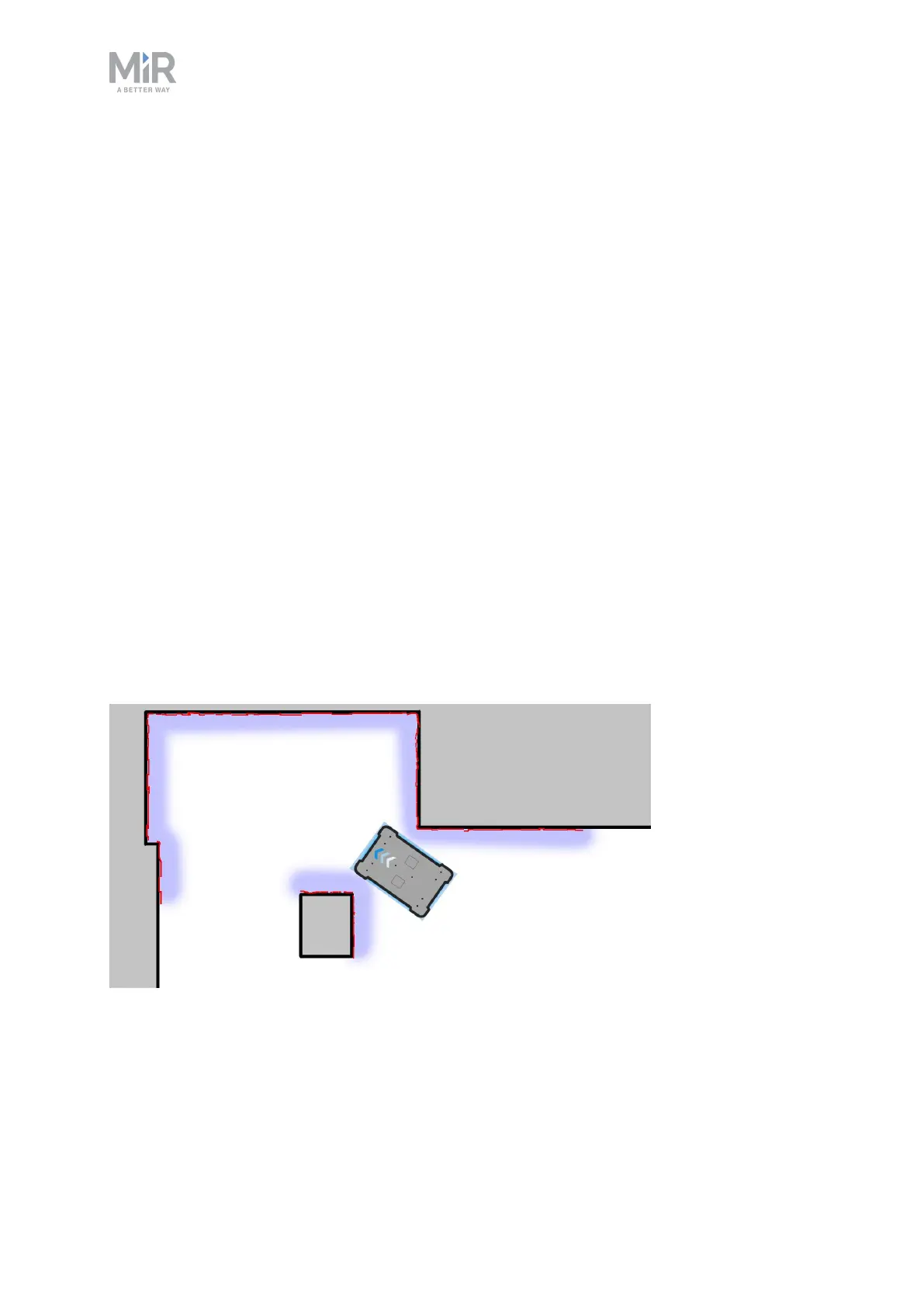
Before creating a marker, you must ensure that the robot is localized correctly on
an active map. If in doubt, you can check if the red lines representing the laser
scanner view match the black lines on the map, as shown in Figure 12.1.
Figure 12.1. The red lines represent the obstacles the laser scanners detect. The robot is localized
correctly when the red lines align with the black lines that represent walls.