9. Navigation and guidance system
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 90
Whereas the global planner creates a single path from start to finish, the local
planner continues to create new paths that adapt to the current position of the
robot and the obstacles around it. The local planner only processes the area that
is immediately surrounding the robot, using input from the robot sensors to
avoid obstacles.
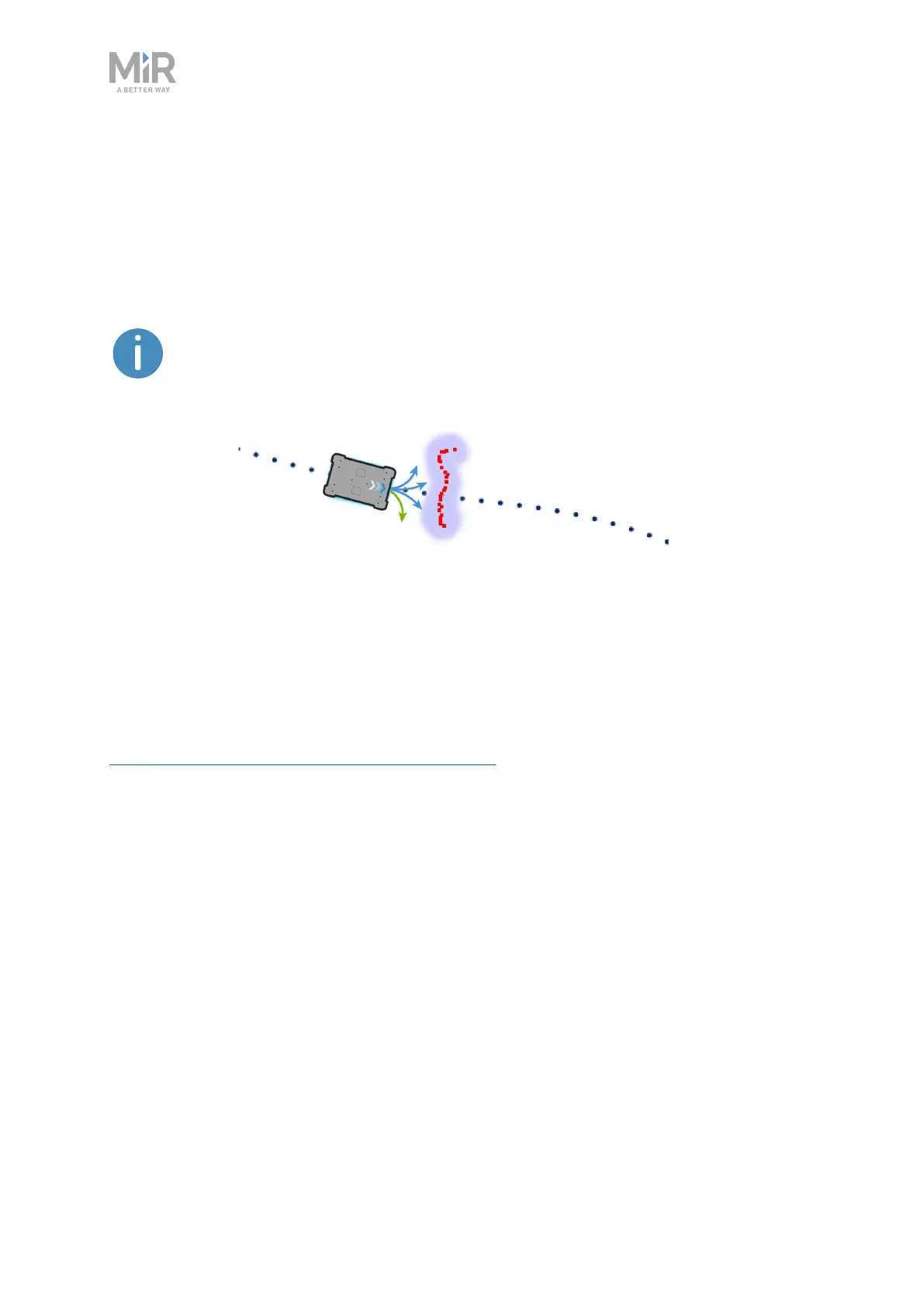
The local path is not displayed in the robot interface. The arrows in
the images here are visual aids used in this guide only.
Figure 9.6. The local planner usually follows the global planner, but as soon as an obstacle gets in
the way, the local planner determines which immediate path will get the robot around the
obstacle. In this case, it will likely choose the path indicated with a green arrow.
Once the local path is determined, the robot computer derives the desired
rotational velocity of each drive wheel to make the robot follow the local path
and sends the desired velocities for each motor to the motor controllers—see
Motor controller and motors on page102.
9.5 Obstacle detection
The robot detects obstacles continuously while driving. This enables the robot to
use the local planner to drive around obstacles and to determine the robot's
current position on the map.
Three sensor types are responsible for detecting obstacles:
•
The safety laser scanners
•
The 3D cameras
•
The proximity sensors