9. Navigation and guidance system
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 89
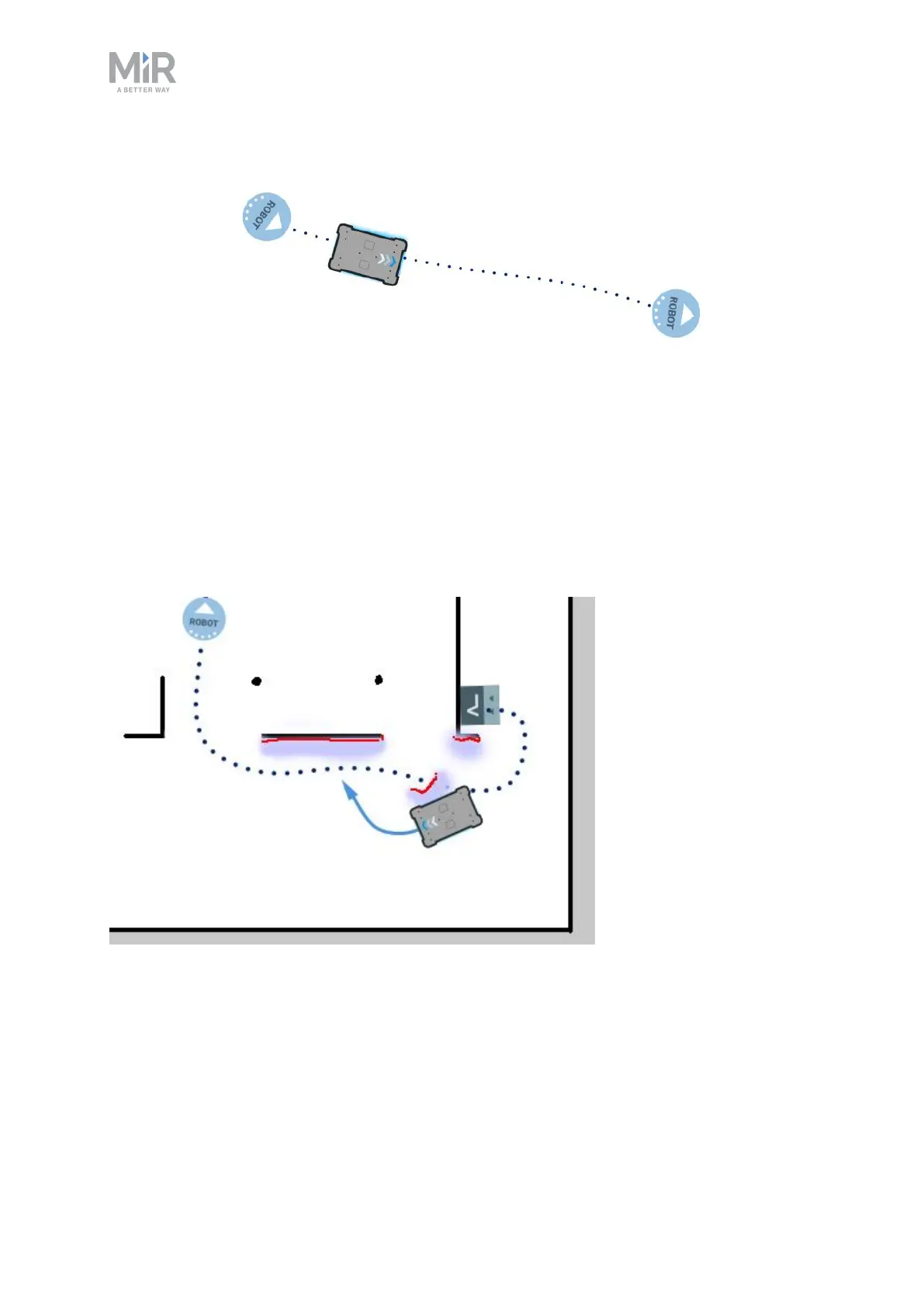
Figure 9.4. The dotted line from the start position of the robot to the goal position is the global
path generated by the robot computer.
9.4 Local planner
The local planner is used continuously while the robot is driving to guide it
around obstacles while still following the global path.
Figure 9.5. The global path is indicated with the dotted blue line and is visible on the map. The
local path is indicated with the blue arrow, showing the robot driving around a dynamic obstacle.