10. Safety-related functions and interfaces
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 128
input from the System emergency stop interface, 3. the robot is in Emergency stop because an
Emergency stop button has been pressed, 4. the robot is in Emergency stop because the inputs
are unequal.
In the Auxiliary safety function interface, pins 7 and 8 are used for the output and
pins 9 and 10 are used for the input of the System emergency stop function.
10.9 Reduced speed
The Reduced speed interface is used to signal to the robot that it must drive at a
reduced speed of 0.3 m/s.This is the same speed used when the robot mutes its
Protective fields. The interface uses one input pin where the robot drives at a
reduced speed when it is 0V.
This can, for example, be used in cases where the top module can register
whether the load it is carrying is not securely placed or the module is currently
under operation.
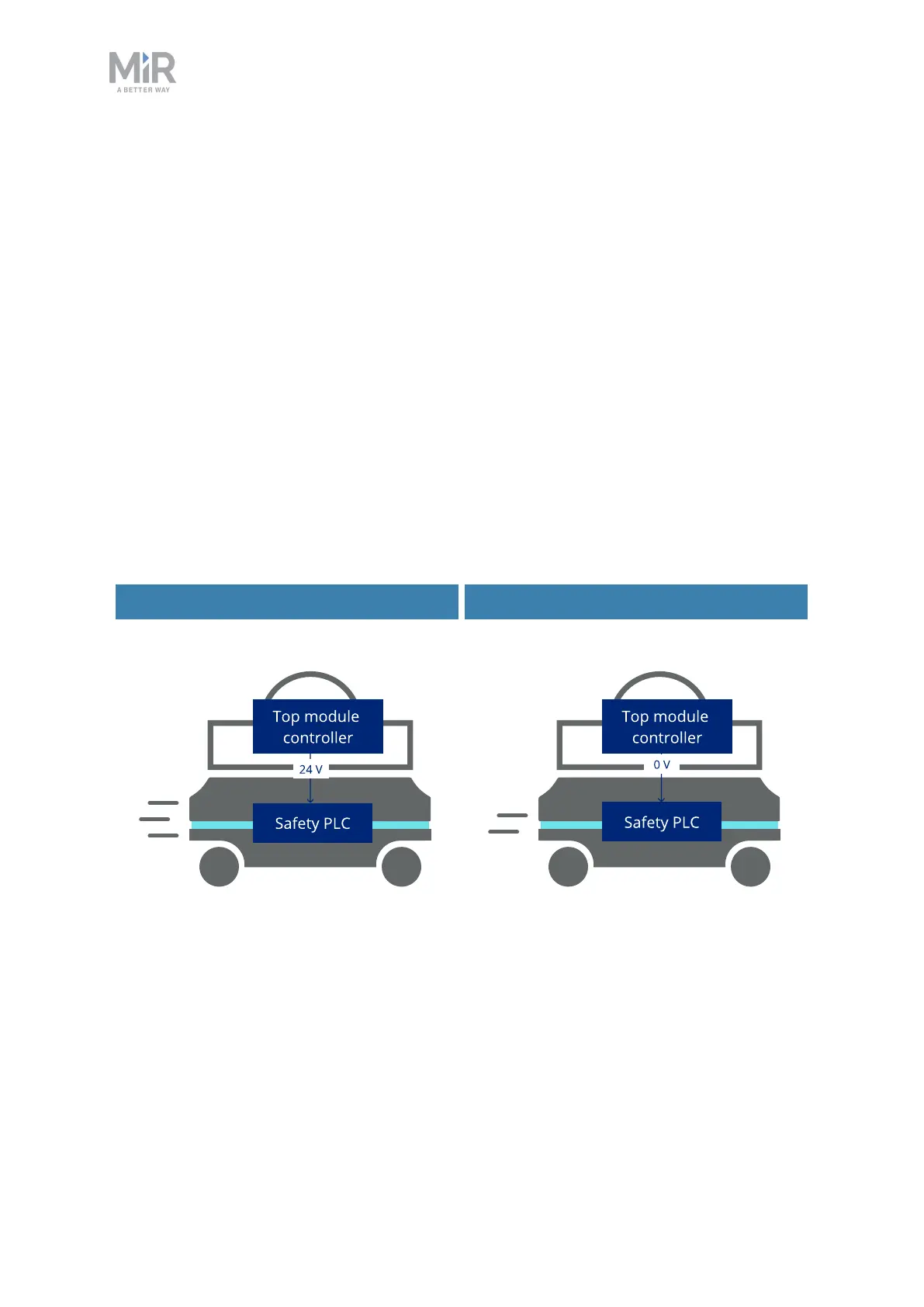
Default speed Reduced speed
Figure 10.12. The robot drives at its default speed only when the input is 24 V. If the pin delivers
0V, the robot drives at 0.3 m/s.
Pin 11 in the Auxiliary safety function interface is used for the Reduced speed
function.