10. Safety-related functions and interfaces
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 127
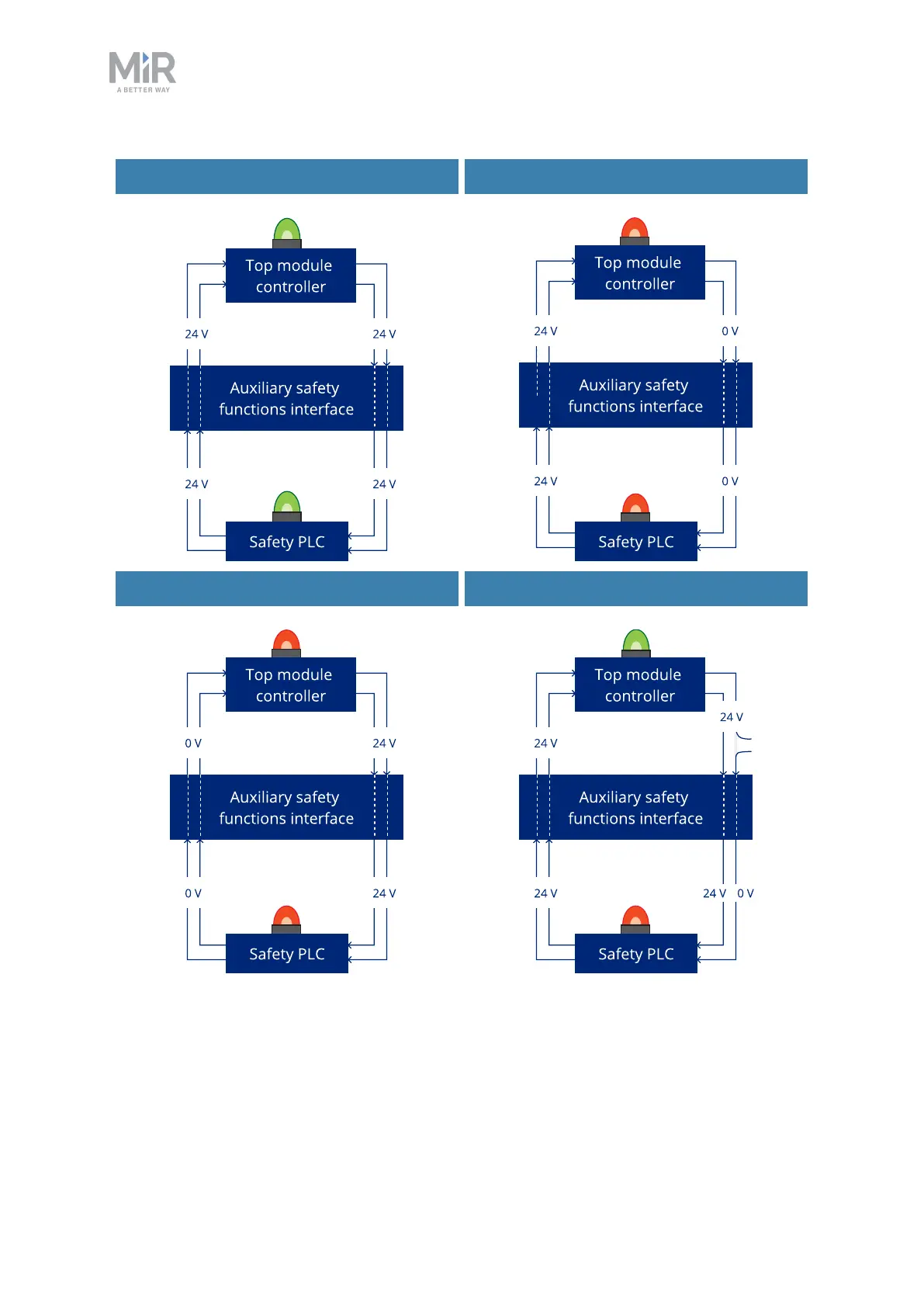
Not in Emergency stop Inputs are 0 V
Button on robot is pressed Inputs are unequal
Figure 10.11. There are four cases described above.They illustrate respectively: 1. the robot is not
in Emergency stop so the output is 24 V, 2. the robot is in Emergency stop because it receives 0V