10. Safety-related functions and interfaces
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 125
10.7 Locomotion
The Locomotion interface is used to signal to a top module that the robot is
driving. This function uses two output pins, where both pins deliver 0 Vwhen the
robot is driving and 24 V when the robot is stopped. You can use this interface to
make your top module behave differently depending on whether the robot is
driving or not.
The interface is intended to be used to ensure that the top module is
programmed to go into a safe state when the robot is driving. For example by
engaging the brakes in any actuators that may result in injury to personnel.
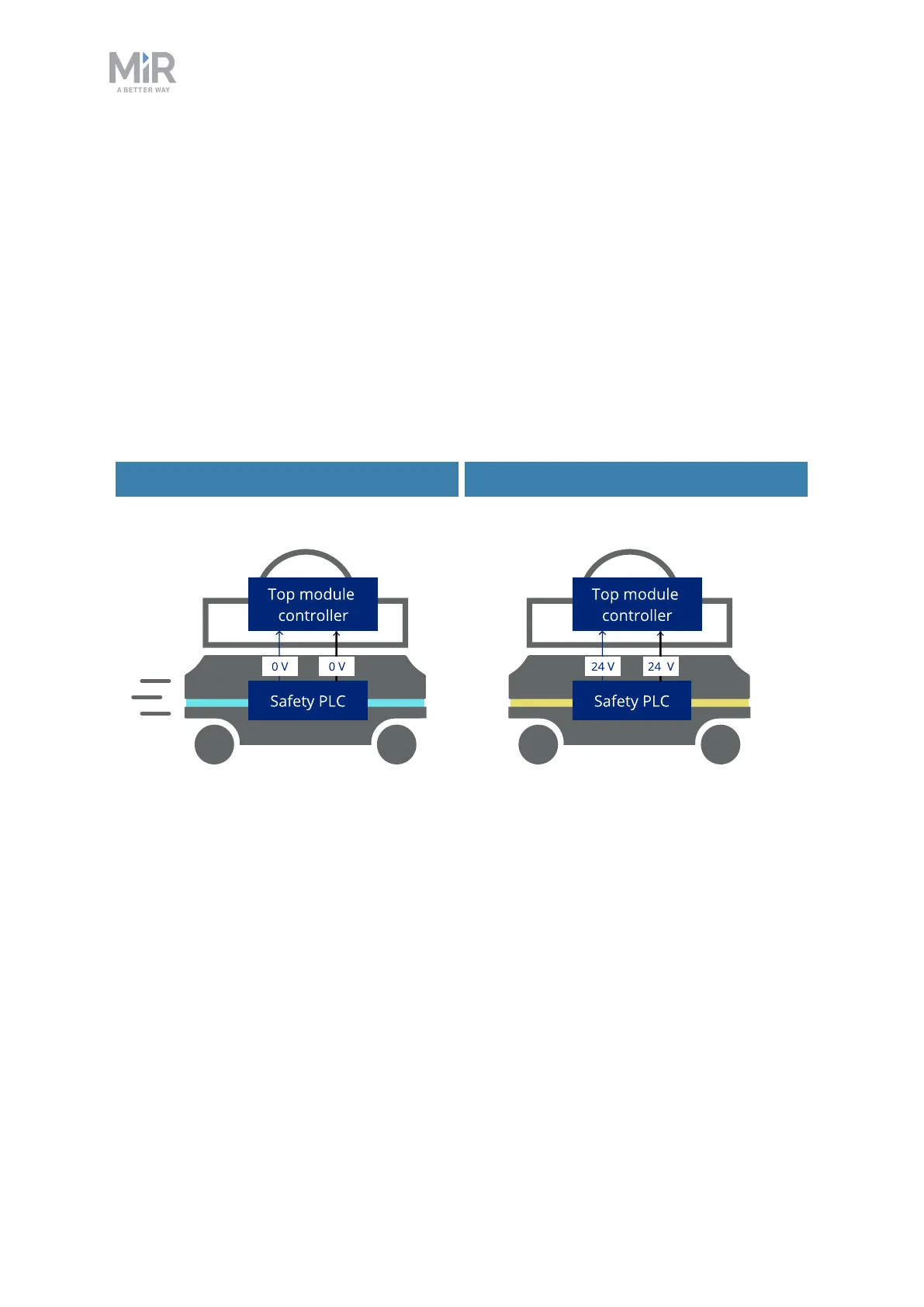
Signal when driving Signal when stopped
Figure 10.10. When the robot is driving, the safety PLC sends a 0 V signal to the top module
through the Auxiliary safety function interface. When the robot is stopped, the signal becomes
24V.
Pins 5 and 6 in the Auxiliary safety function interface are used for the Locomotion
function.