9. Navigation and guidance system
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 91
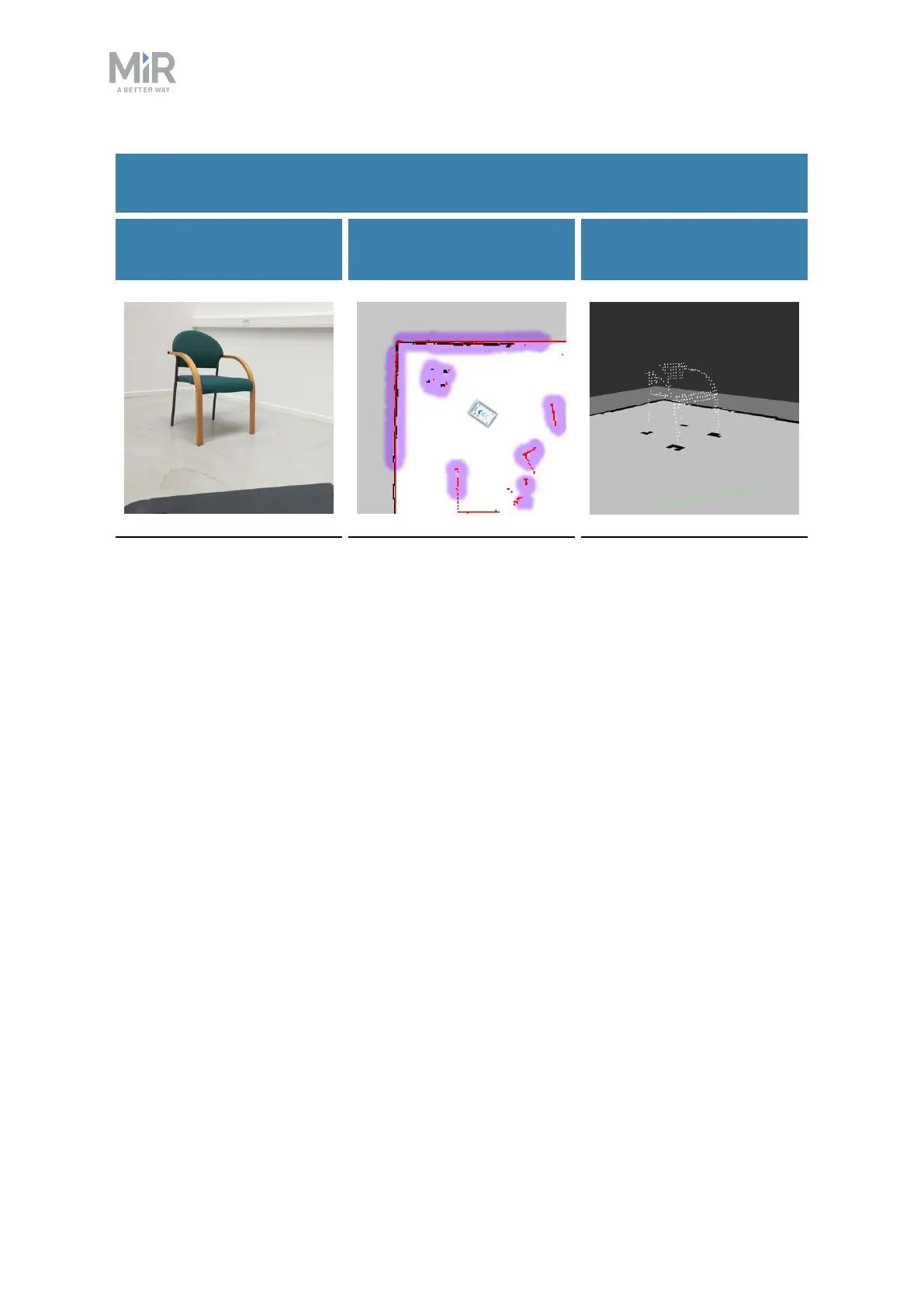
What a human sees
What the laser
scanners see
What the 3D cameras
see
A chair placed in the
corner of a room is
detectable by the robot.
In the robot interface,
the red lines on a map
are obstacles detected
by the laser scanners,
and the purple clouds
are an aggregate of the
3D camera and laser
scanner data. The
scanners only detect
the four legs of the
chair.
The 3D cameras detect
more details of the
chair when the robot
gets close enough to
it.This view cannot be
seen in the robot
interface.
Table 9.1.
Description of how the robot sees obstacles with its sensors
Safety laser scanners
Two safety laser scanners, diagonally placed on one front and one rear corner of
the robot, scan their surroundings. Each safety laser scanner has a 270° field of
view, overlapping and thus providing a full 360° visual protection around the
robot—see Figure 9.7.
When in motion, the safety laser scanners continuously scan the surroundings to
detect objects.