10. Safety-related functions and interfaces
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 122
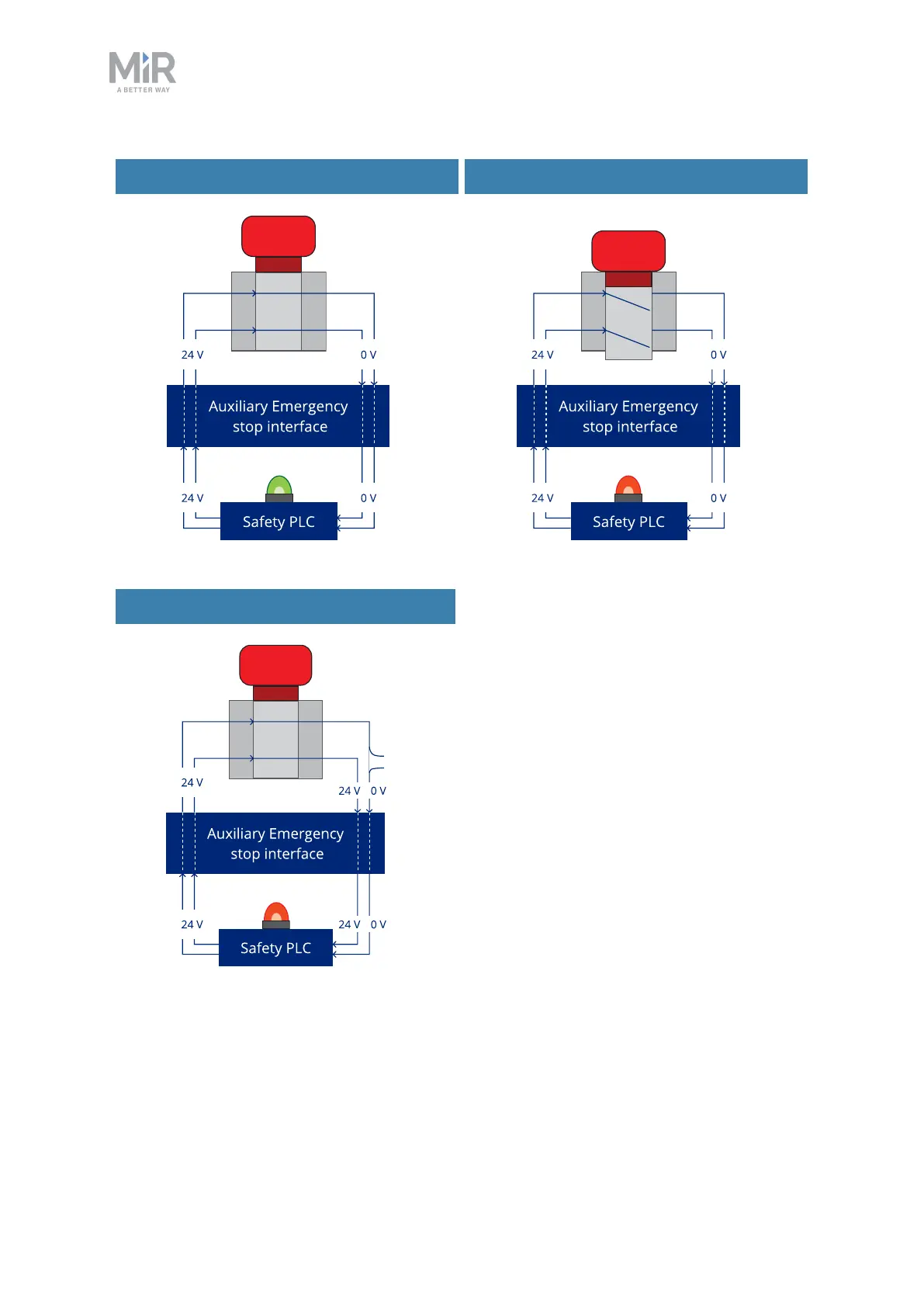
Emergency stop button released Emergency stop button pushed
Emergency stop circuit faulty
Figure 10.8. If the input pins deliver 24 V to the robot, it can operate. When you push a connected
Emergency stop button, both pins deliver 0 V, and the robot enters Emergency stop. If the pins do
not deliver the same input, the robot enters Protective stop until the circuits are fixed.