7 Before Starting Positioning Operation
117
FX3U-20SSC-H Positioning Block User's Manual
1
Introduction
2
System
configuration
3
Example
Connection
4
Installation
5
Wiring
6
Memory
configuration
and data
7
Before starting
positioning
control
8
Manual control
9
Positioning
Control
10
Table Operation
7.9 Other functions
7.9.7 Follow-up function
With the follow-up function, the motor rpm is monitored when the servo is OFF, and the motor rpm is reflected
in the current value.
With this function, even if the servomotor rotates while the servo is OFF, the servomotor always starts
positioning at the next servo-ON, ignoring the drop pulse.
The 20SSC-H always executes the follow-up process during servo OFF. However, the current value may not
be correctly reflected during motor deceleration after a forced stop or alarm occurrence.
Caution
Do not perform the release of a forced stop or release of an alarm during the deceleration of the motor caused
by a forced stop or alarm occurrence. A servo motor carries out the amount of rotation equal to the dropped
pulses, and there is a possibility that the machine will be damaged. Only perform the release of a forced stop
or release of an alarm after confirming that the motor has stopped sufficiently.
7.9.8 Simultaneous start function
Operation in the X- and Y-axes start simultaneously with this function.
→ For the parameters, control data and monitor data, refer to Chapter 11
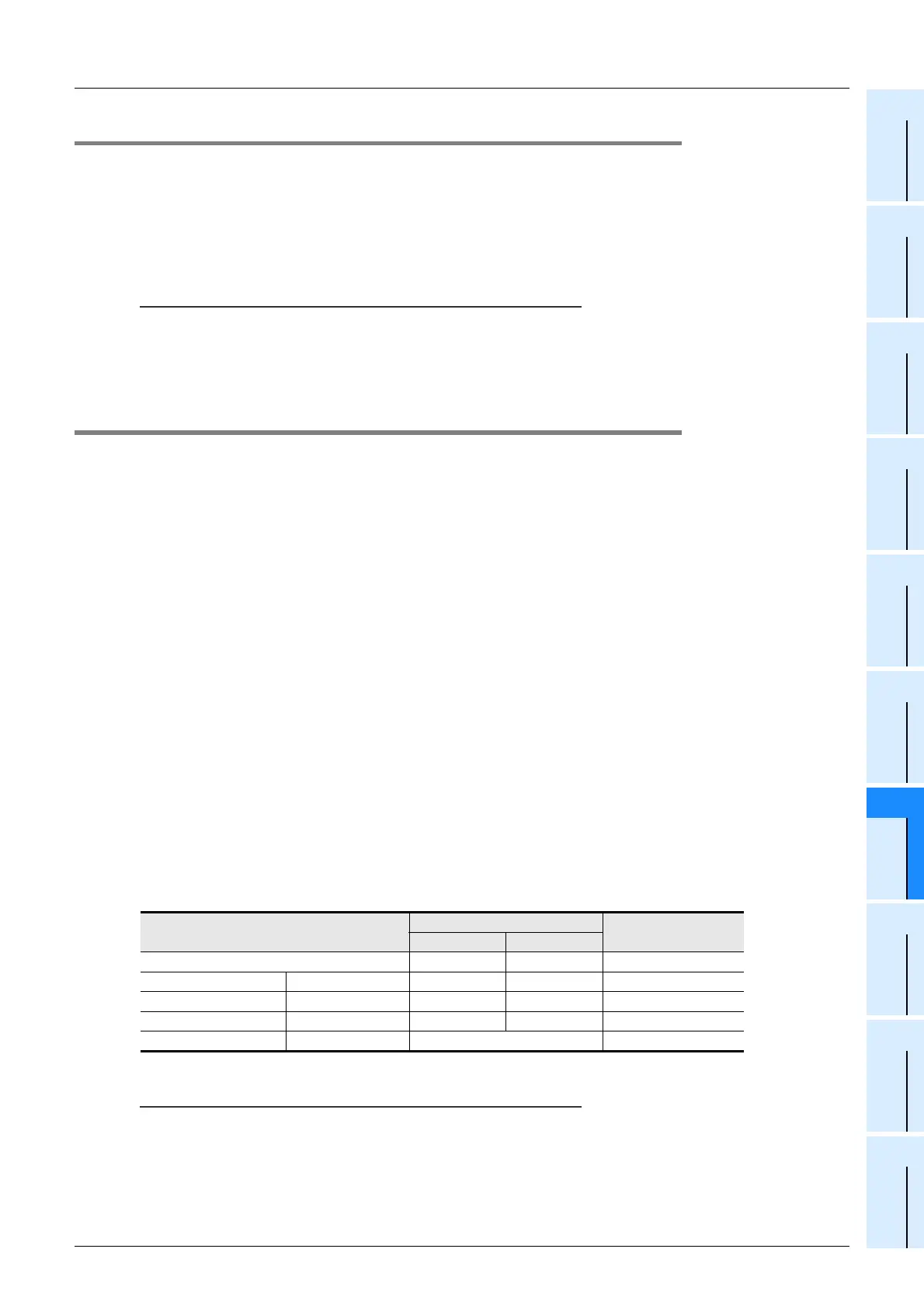
1. Applicable positioning operations
2. Operation
1) Enter the X-axis and Y-axis operation patterns.
2) Turn ON the X-axis simultaneous start flag.
3) Turn ON the X-axis start command.
In JOG operation, turn ON the X-axis forward/reverse rotation jog command.
4) X-axis and Y-axis operation begins simultaneously.
POINT
While the "simultaneous START" flag remains ON, the START command and forward rotation jog/reverse
rotation jog for the Y-axis are ignored.
• Operations applicable to the simultaneous start
function
• Operations inapplicable to the simultaneous
start function
- JOG operation
- Mechanical zero return
- 1-speed positioning operation
- Interrupt 1-speed constant quantity feed
- 2-speed positioning operation
- Interrupt 2-speed constant quantity feed
- Interrupt stop
- Table operation (individual)
- Reciprocal movement instruction
(Ver.1.10 or later)
- Manual pulse generator operation
- Variable speed operation
- Multi-speed operation
- Linear interpolation
- Linear interpolation (interrupt stop)
BFM Number
Data type
X-axis Y-axis
Operation pattern selection BFM #520 BFM #620 Control data
Forward rotation JOG Operation command 1 BFM #518 b4 BFM #618 b4 Control data
Reverse rotation JOG Operation command 1 BFM #518 b5 BFM #618 b5 Control data
START command Operation command 1 BFM #518 b9 BFM #618 b9 Control data
Simultaneous START flag Operation command 1 BFM #518 b10 Control data

 Loading...
Loading...







