7 Before Starting Positioning Operation
79
FX3U-20SSC-H Positioning Block User's Manual
1
Introduction
2
System
configuration
3
Example
Connection
4
Installation
5
Wiring
6
Memory
configuration
and data
7
Before starting
positioning
control
8
Manual control
9
Positioning
Control
10
Table Operation
7.2 Outline of Positioning Operation
7.2 Outline of Positioning Operation
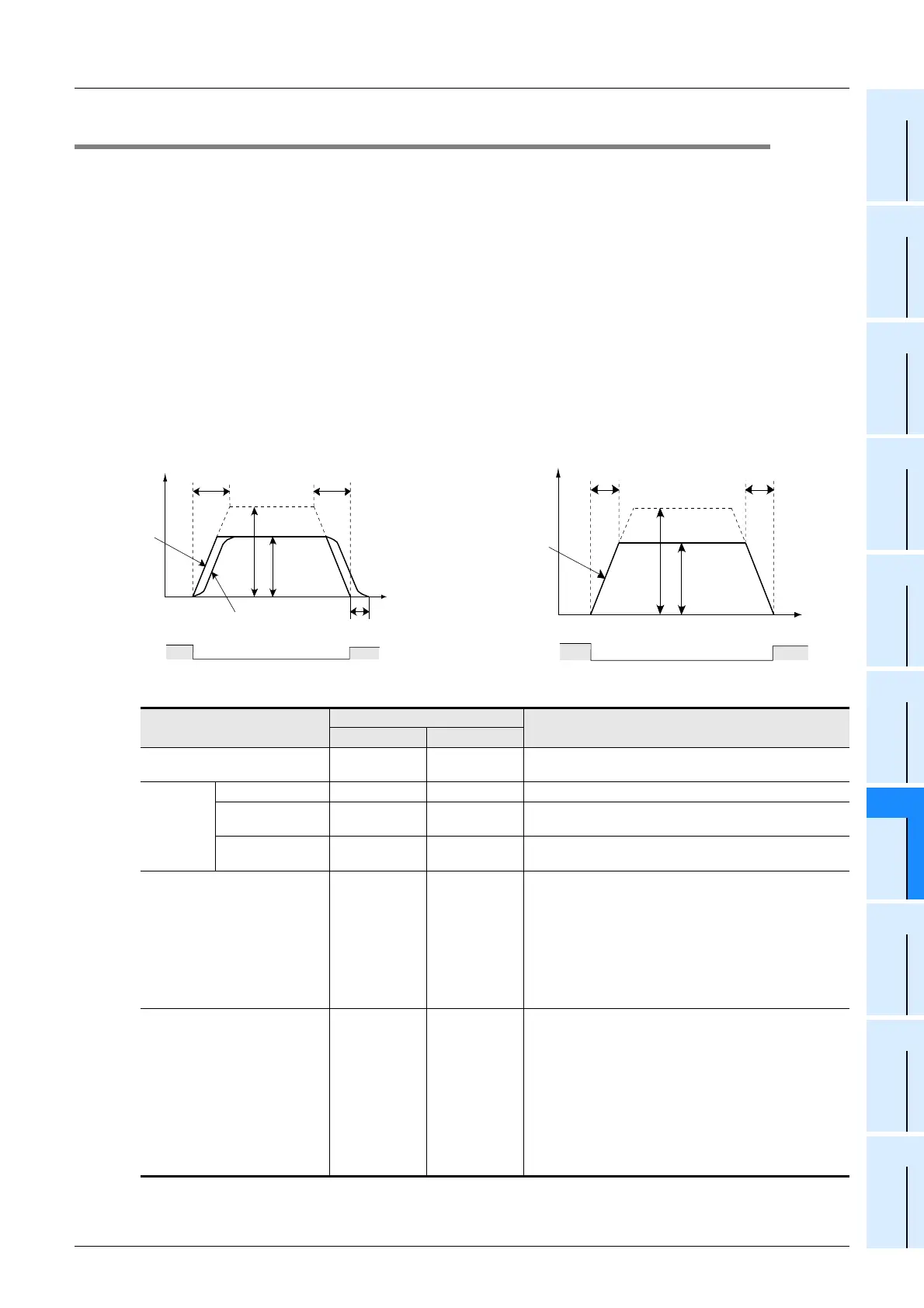
The relationship between the operation speed, acceleration/deceleration time and travel distance of the
positioning operation is shown below.
For futher details on the positioning operations supported by 20SSC-H and a note on positioning cautions,
refer to the following.
→ For a note on positioning cautions, refer to the next page
→ For the parameter setting and change methods, refer to Section 7.1
→ For the parameters, control data and monitor data, refer to Chapter 11
→ For the operation speed and target address change methods, refer to Section 7.6
→ For selection of the acceleration/deceleration time, refer to Section 7.7
→ For manual operation, refer to Chapter 8
→ For positioning operations other than table operation, refer to Chapter 9
→ For table operation, refer to Chapter 10
→ For program examples, refer to Chapter 12
Parameters and control data used for positioning operation
Item
BFM number
Description
X-axis Y-axis
Maximum speed
BFM
#14009,#14008
BFM
#14209,#14208
Upper limit of speed in each operation mode
Operation
speed
Operation speed 1 BFM #503,#502 BFM #603,#602 Actual operation speed in each operation mode
Operation speed 2 BFM #507,#506 BFM #607,#606
Actual operation speed for two-speed positioning operation
and interrupt two-speed positioning
JOG speed
BFM
#14013,#14012
BFM
#14213,#14212
Manual forward/reverse JOG operation speed
Acceleration/deceleration mode
[Operation parameter 1]
BFM #14000 b11 BFM #14200 b11
Select the control method adopted during acceleration/
deceleration.
Trapezoidal acceleration/deceleration is automatically
adopted during interpolation operation.
OFF: Adopts trapezoidal acceleration/deceleration.
ON: Adopts approximate S-shaped acceleration/
deceleration usually, but adopts trapezoidal
acceleration/deceleration only during interpolation
operation.
Acceleration/deceleration time
change command
(Ver. 1.30 or later)
[Operation command 2]
BFM #519 b5 BFM #619 b5
Select the acceleration/deceleration time adopted during
acceleration/deceleration.
The interpolation time constant is automatically adopted for
the acceleration/deceleration time during interpolation
operation.
→ For selection of the acceleration/
deceleration time, refer to Section 7.7
OFF: Performs positioning operation using the acceleration
time and deceleration time.
ON: Performs positioning operation using the acceleration
time 2 and deceleration time 2.
ON
OFF
Speed
Acceleration
time
Deceleration
time
Max. speed
Trapezoidal
acceleration/
deceleration
Operation
speed
Time
S-shaped time
constant
(fixed at 64ms)
Approximate S-shaped
acceleration/deceleration
Positioning
completion flag
ON
OFF
Speed
Interpolation time
constant
Interpolation time
constant
Max. speed
Trapezoidal
acceleration/
deceleration
Operation
speed
Time
Positioning
completion flag
In individual axis operation In simultaneous two-axis operation
(interpolation operation)

 Loading...
Loading...







