7 Before Starting Positioning Operation
73
FX3U-20SSC-H Positioning Block User's Manual
1
Introduction
2
System
configuration
3
Example
Connection
4
Installation
5
Wiring
6
Memory
configuration
and data
7
Before starting
positioning
control
8
Manual control
9
Positioning
Control
10
Table Operation
7.1 Note on Setting Parameters
7.1.8 Updating some servo parameters [sequence program]
This subsection explains how to transfer the following servo parameters changed using a sequence program
to the servo amplifier.
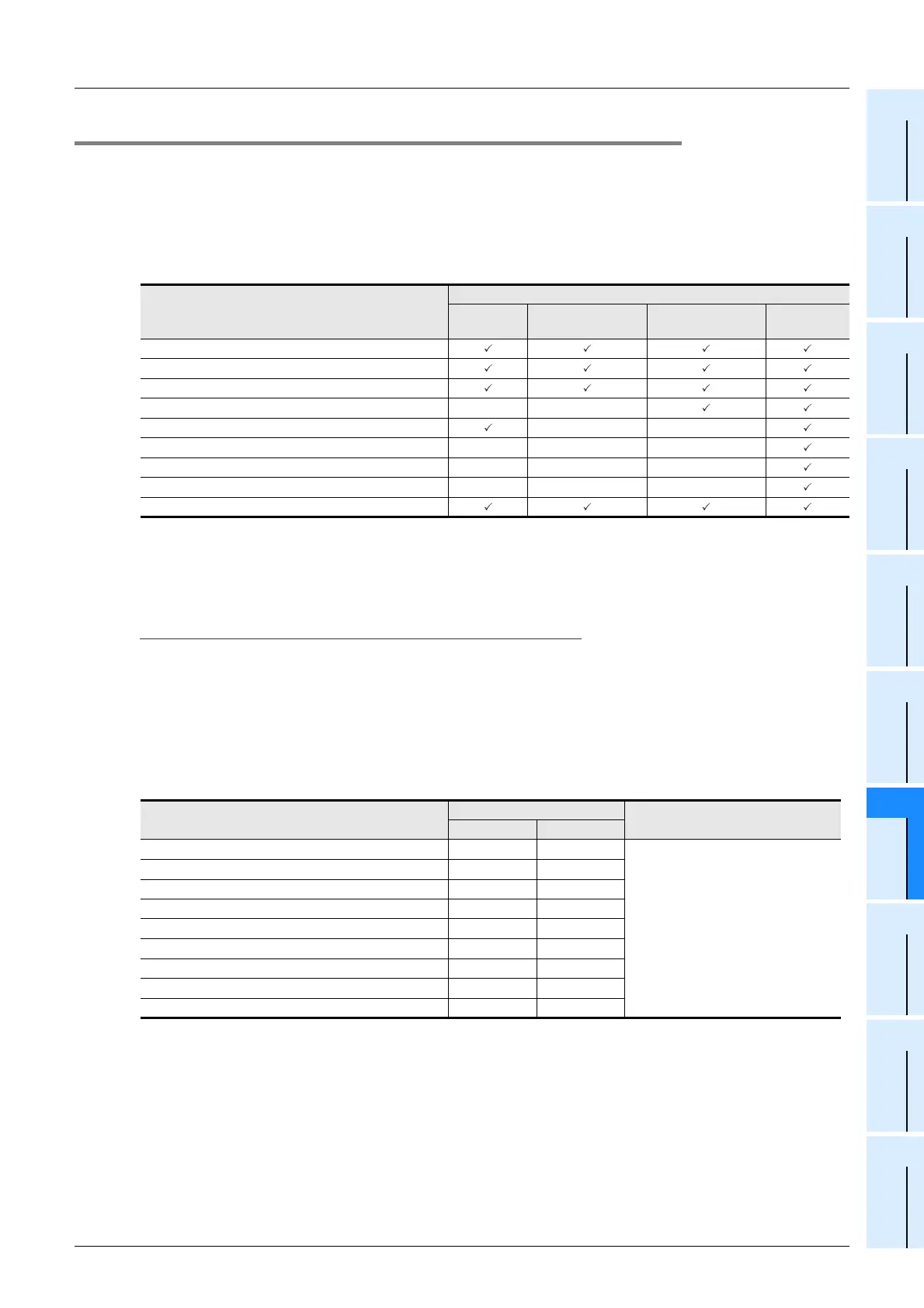
The table below shows transferrable servo parameters in accordance with the setting of the auto tuning
mode.
→ For operation command 2, refer to Subsection 11.4.11
→ For direct specification of the buffer memory using the FROM/TO instruction and applied
instructions, refer to Section 12.1 and the PROGRAMMING MANUAL
*1. These parameters are automatically adjusted in the interpolation mode.
*2. These parameters are automatically adjusted in auto tuning mode 1.
*3. These parameters are automatically adjusted in auto tuning mode 2.
Note: Servo parameter transfer command execution condition
The servo parameter transfer command is enabled when the "READY/BUSY" bit in the status information is
"READY (ON)."
The servo parameter transfer command is ignored while the system is performing positioning operation.
1) Set the following servo parameters to be transferred stored in the buffer memory.
Create a program which sets servo parameters by direct specification of the buffer memory using the
FROM/TO instruction and applied instructions, and then save set values to the buffer memory.
→ For the contents of setting of servo parameters, refer to Section 11.2
Auto tuning mode setting status
Interpolation
mode
Auto tuning mode 1 Auto tuning mode 2 Manual mode
Auto tuning mode
Auto tuning response
Feed forward gain
Ratio of load inertia moment to servo motor inertia moment *1 *2
Model loop gain *2 *3
Position loop gain *1 *2 *3
Speed loop gain *1 *2 *3
Speed integral compensation *1 *2 *3
Speed differential compensation
BFM Number
Description
X-axis Y-axis
Auto tuning mode BFM #15008 BFM #15208
Set these parameters in accordance
with the system. Transferrable servo
parameters vary depending on the
setting of the auto tuning mode (as
shown in the above table).
→ For details, refer to the
servo amplifier manual
Auto tuning response BFM #15009 BFM #15209
Feed forward gain BFM #15022 BFM #15222
Ratio of load inertia moment to servo motor inertia moment BFM #15024 BFM #15224
Model loop gain BFM #15025 BFM #15225
Position loop gain BFM #15026 BFM #15226
Speed loop gain BFM #15027 BFM #15227
Speed integral compensation BFM #15028 BFM #15228
Speed differential compensation BFM #15029 BFM #15229

 Loading...
Loading...







