8 Manual Control
8.1 Mechanical Zero Return Control
139
FX3U-20SSC-H Positioning Block User's Manual
1
Introduction
2
System
configuration
3
Example
Connection
4
Installation
5
Wiring
6
Memory
configuration
and data
7
Before starting
positioning
control
8
Manual control
9
Positioning
Control
10
Table Operation
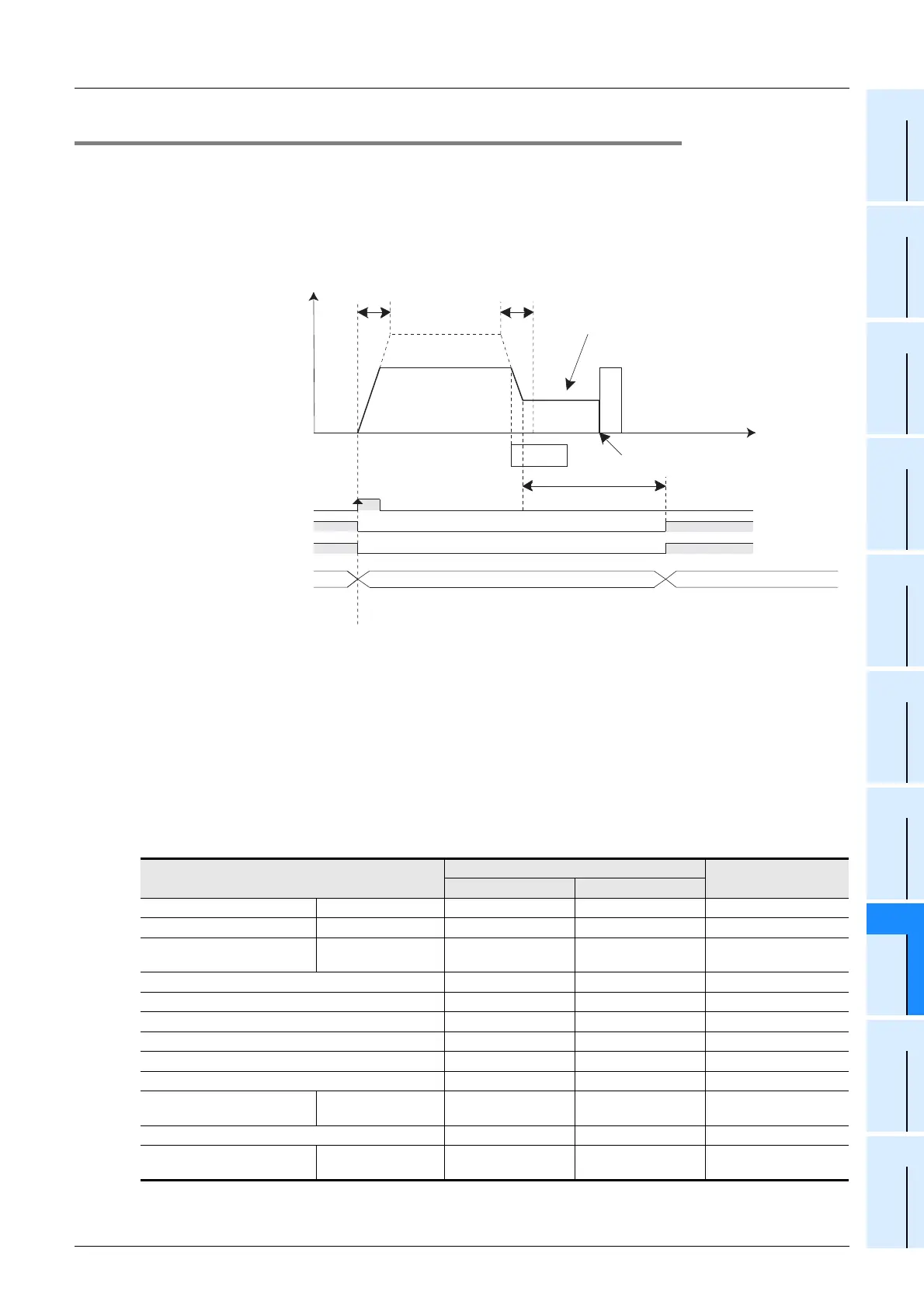
8.1.4 Stopper type (1) mechanical zero return operation
This mechanical zero return method uses the DOG signal and stopper.
High speed travel is possible up to the DOG signal, thus reducing the time for mechanical zero return.
→ For the zero return interlock function, refer to Subsection 7.9.10
→ For details on the table operation, refer to Chapter 10
→ For the parameters, control data and monitor data, refer to Chapter 11
1. Operation
1) At the rising edge (OFF → ON) of the mechanical zero return command, the work piece moves in the
zero return direction at the zero return speed (high speed).
2) At the DOG input, the 20SSC-H decelerates the work piece to the zero return speed (creep).
3) The work piece hits the stopper, and the work piece stops when the servomotor torque reaches the zero
return torque limit value.
4) After the stop point, the current address is set as the mechanical zero-point address in the positioning
parameters.
5) The 20SSC-H turns the positioning completion flag ON and sets (turns ON) the zero return complete
flag.
→ For the parameters, control data and monitor data, refer to Chapter 11
BFM Number
Data type
X-axis Y-axis
Zero return direction Operation parameter 1 BFM #14000 b10 BFM #14200 b10 Positioning parameters
DOG input logic (20SSC-H) Operation parameter 1 BFM #14000 b12 BFM #14200 b12 Positioning parameters
Zero return interlock setting
enabled/disabled
Operation parameter 2 BFM #14002 b2 BFM #14202 b2 Positioning parameters
Maximum speed BFM #14009,#14008 BFM #14209,#14208 Positioning parameters
Acceleration time BFM #14018 BFM #14218 Positioning parameters
Deceleration time BFM #14020 BFM #14220 Positioning parameters
Zero return speed (high speed) BFM #14025,#14024 BFM #14225,#14224 Positioning parameters
Zero return speed (creep) BFM #14027,#14026 BFM #14227,#14226 Positioning parameters
Mechanical zero-point address BFM #14029,#14028 BFM #14229,#14228 Positioning parameters
Stopper type (1) mechanical
zero return operation
Zero return mode BFM #14031 = K2 BFM #14231 = K2 Positioning parameters
Zero return torque limit value BFM #14040 BFM #14240 Positioning parameters
Use/ not use DOG signal of
servo amplifier
External input selection BFM #14044 b1 BFM #14244 b1 Positioning parameters
DOG
1)
OFF
ON
ON
ON
OFF
OFF
2)
3)
Speed
Acceleration time
Deceleration time
Maximum speed
Zero return speed (creep)
Stopper
Time
Stopped due to torque limit
Zero return torque limit
Mechanical zero return command
Positioning completion
Zero return completion
Current address (user)
Current address (pulse)
The travel value
Mechanical zero point address
Zero return speed
(high speed)

 Loading...
Loading...







