9 Positioning Control
9.6 Interrupt Stop Operation
166
FX3U-20SSC-H Positioning Block User's Manual
9.6 Interrupt Stop Operation
→ For details on the operation speed change and target address change, refer to Section 7.6
→ For details on the torque limit, refer to Subsection 7.9.3
→ For details on the STOP command, refer to Section 7.4
→ For setting of ring operation in the current address, refer to Section 7.8
→ For details on the table operation, refer to Chapter 10
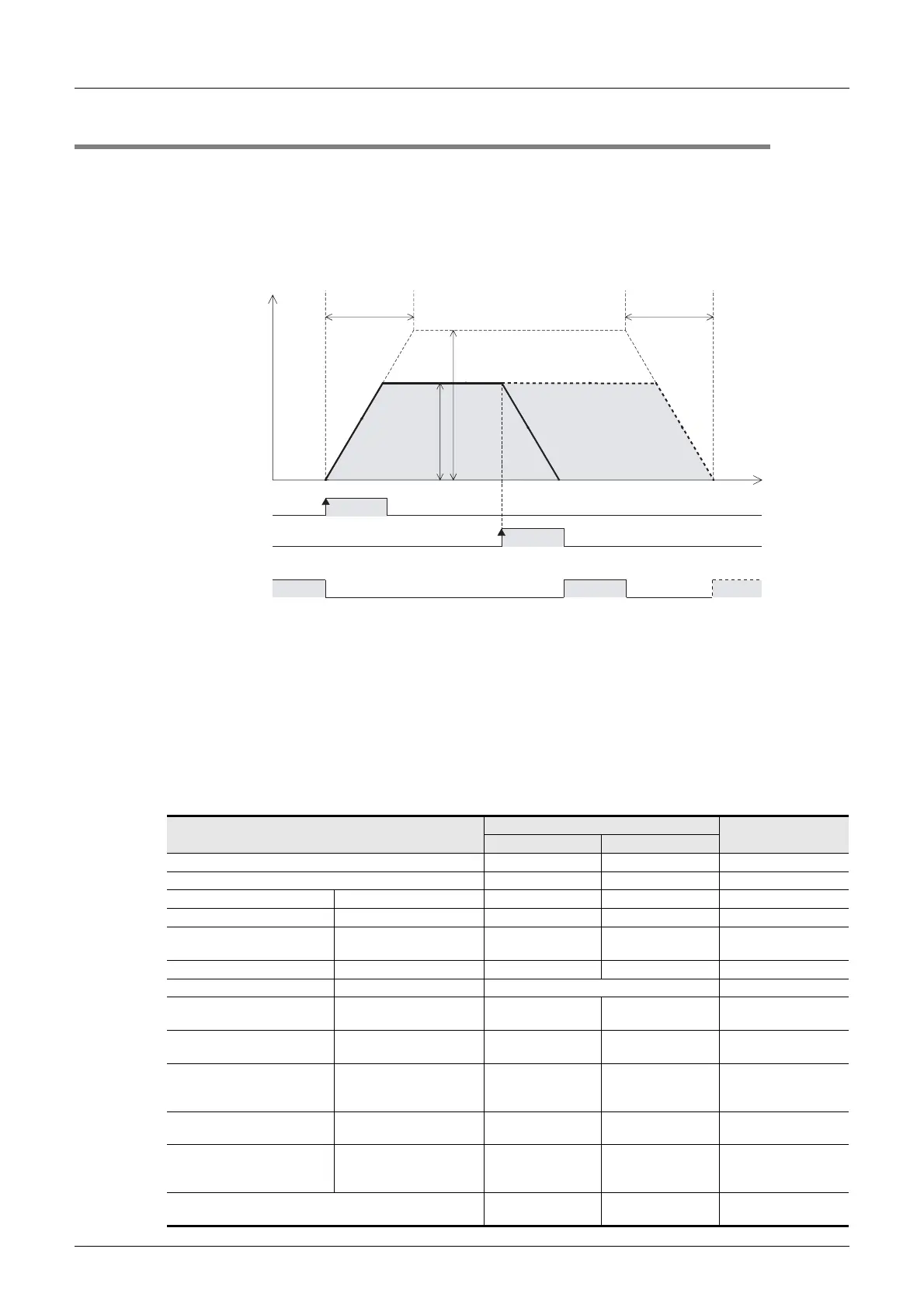
1. Operation
1) Set operation speed 1 and target address 1 (maximum travel distance).
2) Select the Interrupt stop operation from operation patterns and activate the START command to start the
Interrupt stop operation at operation speed 1 (above figure).
(The positioning completion signal is turned OFF.)
3) At interrupt input (INT0) ON, before target address 1, the work piece decelerates to stop, and the
operation ends, turning the positioning completion signal ON.
When the interrupt input (INT0) does not turn ON before target address 1, the work piece decelerates to
stop at target address 1, and the operation ends, turning the positioning completion signal ON.
In a 20SSC-H Ver. 1.30 or later, the current address when an interrupt input (INT0) occurs is stored in the
"current address when an interrupt occurs (INT0)."
→ For the parameters, control data and monitor data, refer to Chapter 11
BFM Number
Data type
X-axis Y-axis
Target address 1 BFM #501,#500 BFM #601,#600 Control data
Operation speed 1 BFM #503,#502 BFM #603,#602 Control data
Interrupt stop Operation pattern selection BFM #520 b4 BFM #620 b4 Control data
STOP command Operation command 1 BFM #518 b1 BFM #618 b1 Control data
Relative/absolute address
specification
Operation command 1 BFM #518 b8 BFM #618 b8 Control data
START command Operation command 1 BFM #518 b9 BFM #618 b9 Control data
Simultaneous START flag Operation command 1 BFM #518 b10 Control data
Change command in operation
disabled
Operation command 1 BFM #518 b12 BFM #618 b12 Control data
Speed change command in
positioning operation
Operation command 1 BFM #518 b13 BFM #618 b13 Control data
Target position change
command in positioning
operation
Operation command 1 BFM #518 b14 BFM #618 b14 Control data
Remaining distance operation
cancel command
Operation command 2 BFM #519 b0 BFM #619 b0 Control data
Acceleration/deceleration time
change command
(Ver. 1.30 or later)
Operation command 2 BFM #519 b5 BFM #619 b5 Control data
Ring operation rotation direction for absolute address
(Ver. 1.10 or later)
BFM #530 BFM #630 Control data
Operation
speed 1
Deceleration
time
Time
Speed
Acceleration
time
START command
Target address 1
Interrupt input (INT0)
Maximum speed
ON
2)
3) 3)
OFF
OFF
ON
OFF
ON
Positioning completion
ON
OFF
ON

 Loading...
Loading...







