9 Positioning Control
9.12 Reciprocal movement insutruction (Ver.1.10 or later)
187
FX3U-20SSC-H Positioning Block User's Manual
1
Introduction
2
System
configuration
3
Example
Connection
4
Installation
5
Wiring
6
Memory
configuration
and data
7
Before starting
positioning
control
8
Manual control
9
Positioning
Control
10
Table Operation
• Opening operation
When the open signal is set to ON from OFF, the system decelerates and stops opening operation (
above).
After deceleration stop, the system performs as follows in accordance with the status of the open signal
(INT0) and close signal (INT1).
- Close signal (INT1) = OFF:The system starts closing operation ( above).
(The system starts to move toward target address 2 at operation speed 2.)
- Close signal (INT1) = ON, open signal (INT0) = ON: The system remains stopped in the stopped
position.
- Close signal (INT1) = ON, open signal (INT0) = OFF:The system starts opening operation.
(The system starts to move toward target address
1 at operation speed 1.)
• Closing operation
When the close signal is set to ON from OFF, the system decelerates and stops closing operation (
above).
After deceleration stop, the system performs as follows in accordance with the status of the open signal
(INT0) and close signal (INT1).
- Open signal (INT0) = OFF:The system starts opening operation ( above).
(The system starts to move toward target address 1 at operation speed 1.)
- Open signal (INT0) = ON, close signal (INT1) = ON: The system remains stopped in the stopped
position.
- Open signal (INT0) = ON, close signal (INT1) = OFF:The system starts closing operation. (The system
starts to move toward target address 2 at
operation speed 2.)
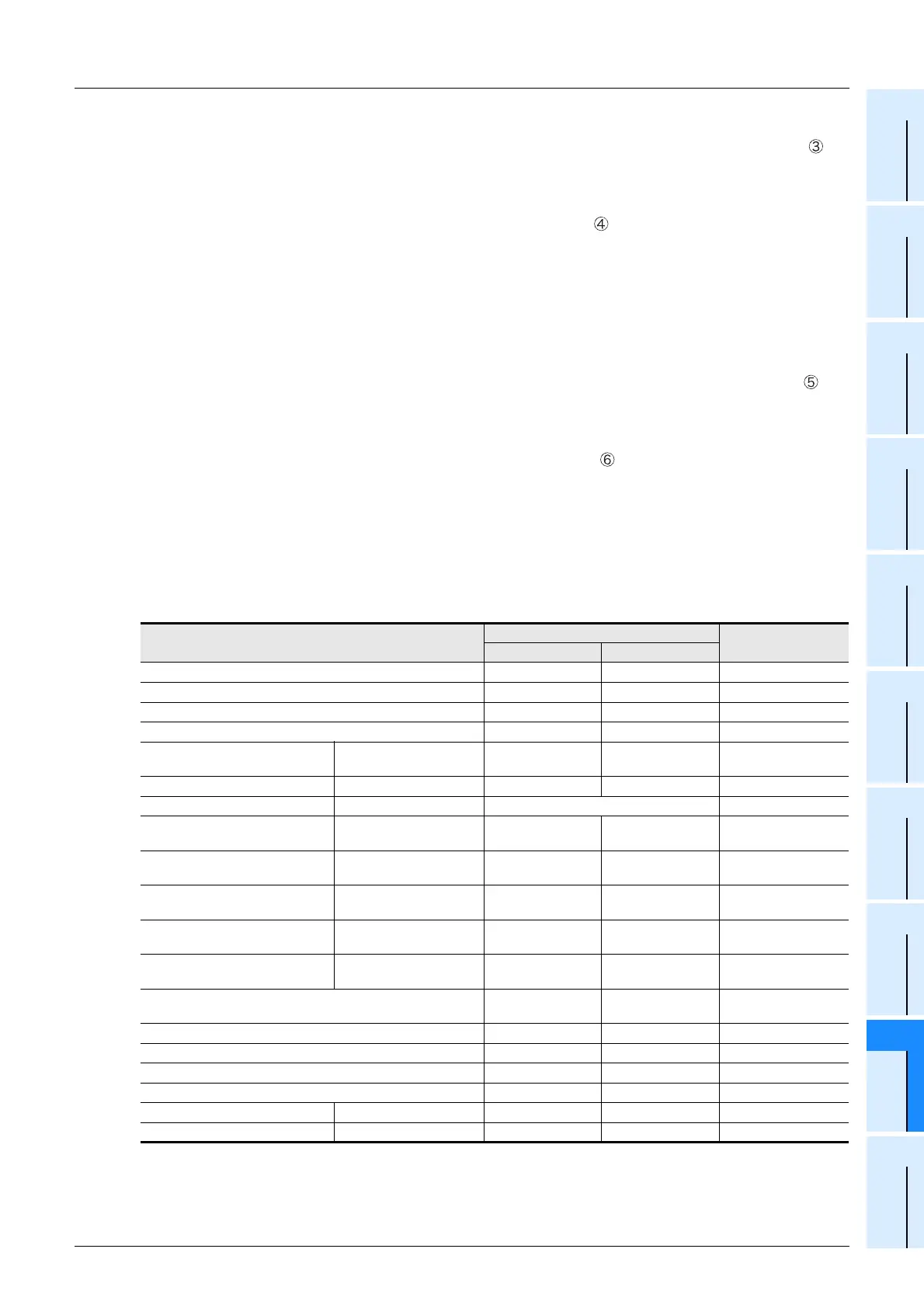
→ For the parameters, control data and monitor data, refer to Chapter 11
BFM Number
Data type
X-axis Y-axis
Target address 1 BFM #501,#500 BFM #601,#600 Control data
Operation speed 1 BFM #503,#502 BFM #603,#602 Control data
Target address 2 BFM #505,#504 BFM #605,#604 Control data
Operation speed 2 BFM #507,#506 BFM #607,#606 Control data
Reciprocal movement instruction
(Ver.1.10 or later)
Operation pattern selection BFM #520 b11 BFM #620 b11 Control data
STOP command Operation command 1 BFM #518 b1 BFM #618 b1 Control data
Simultaneous START flag Operation command 1 BFM #518 b10 Control data
Change command in operation
disabled
Operation command 1 BFM #518 b12 BFM #618 b12 Control data
Speed change command in
positioning operation
Operation command 1 BFM #518 b13 BFM #618 b13 Control data
Target position change command in
positioning operation
Operation command 1 BFM #518 b14 BFM #618 b14 Control data
Remaining distance operation
cancel command
Operation command 2 BFM #519 b0 BFM #619 b0 Control data
Acceleration/deceleration time
change command (Ver.1.30 or later)
Operation command 2 BFM #519 b5 BFM #619 b5 Control data
Ring operation rotation direction for absolute address
(Ver.1.10 or later)
BFM #530 BFM #630 Control data
X-INT0(Input terminal) - - Input terminal
Y-INT0(Input terminal) - - Input terminal
X-INT1(Input terminal) - - Input terminal
Y-INT1(Input terminal) - - Input terminal
Positioning completion Status information BFM #28 b6 BFM #128 b6 Monitor data
READY/BUSY Status information BFM #28 b0 BFM #128 b0 Monitor data

 Loading...
Loading...







