Setting up Compax3
C3I12T11
192-120113 N08 C3I12T11 - December 2010
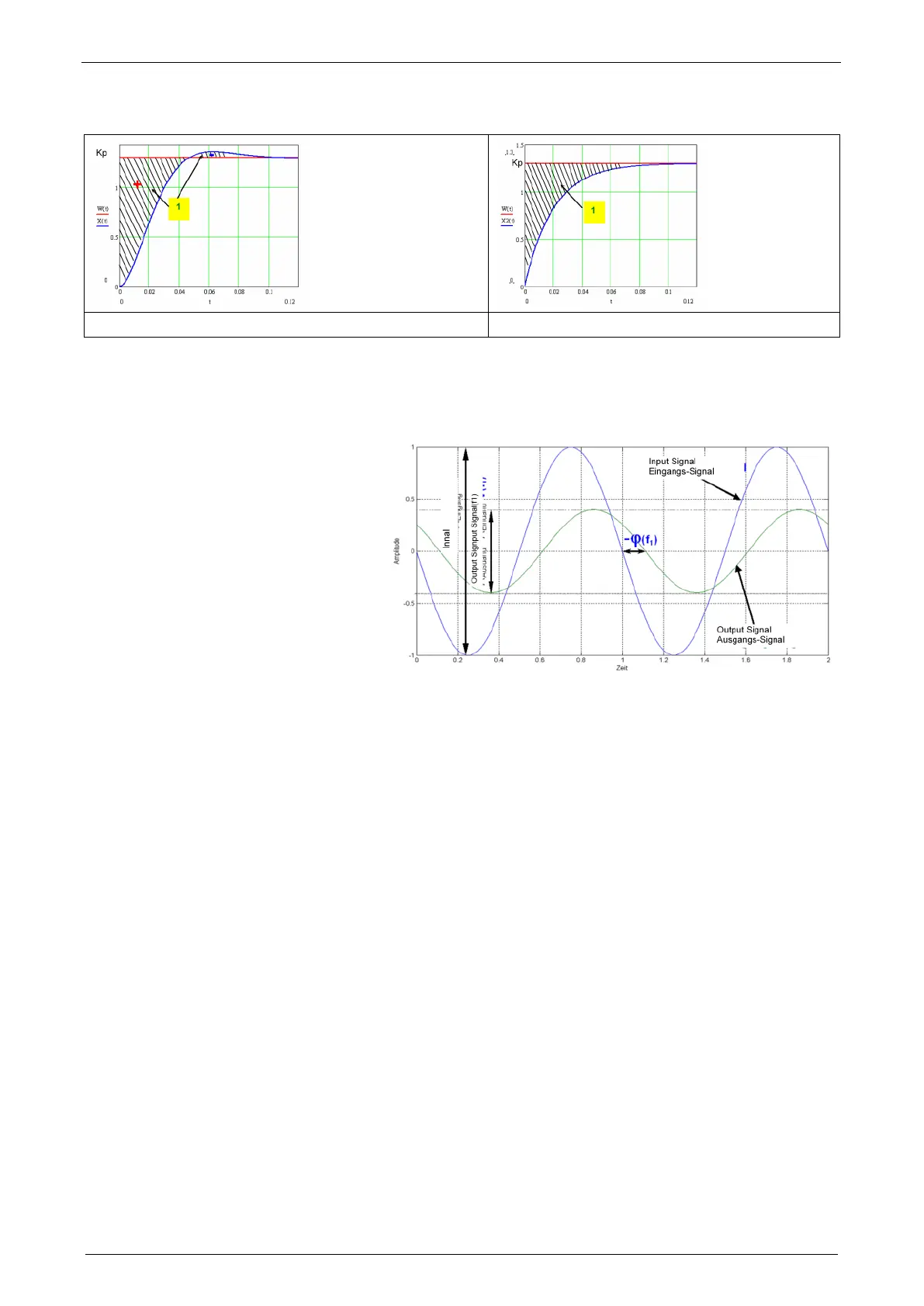
Determination of the control surface from the transmission behavior of a P-TE component.
1: Control surface of the approximated system 2: Control surface of the ideal P-T1 component
The velocity of a dynamic system can also be described in the frequency range. In
the frequency range, the system behavior is analyzed to sinusoidal inputs signals
of different frequencies (frequency response).
Input and output signals of a dynamic transmission component at a defined
frequency f=f1
The bode diagram represents the behavior of a dynamic system (in our case of the
P-TE component) against the input signal frequency with respect to amplitude and
phase.