Setting up Compax3
C3I12T11
192-120113 N08 C3I12T11 - December 2010
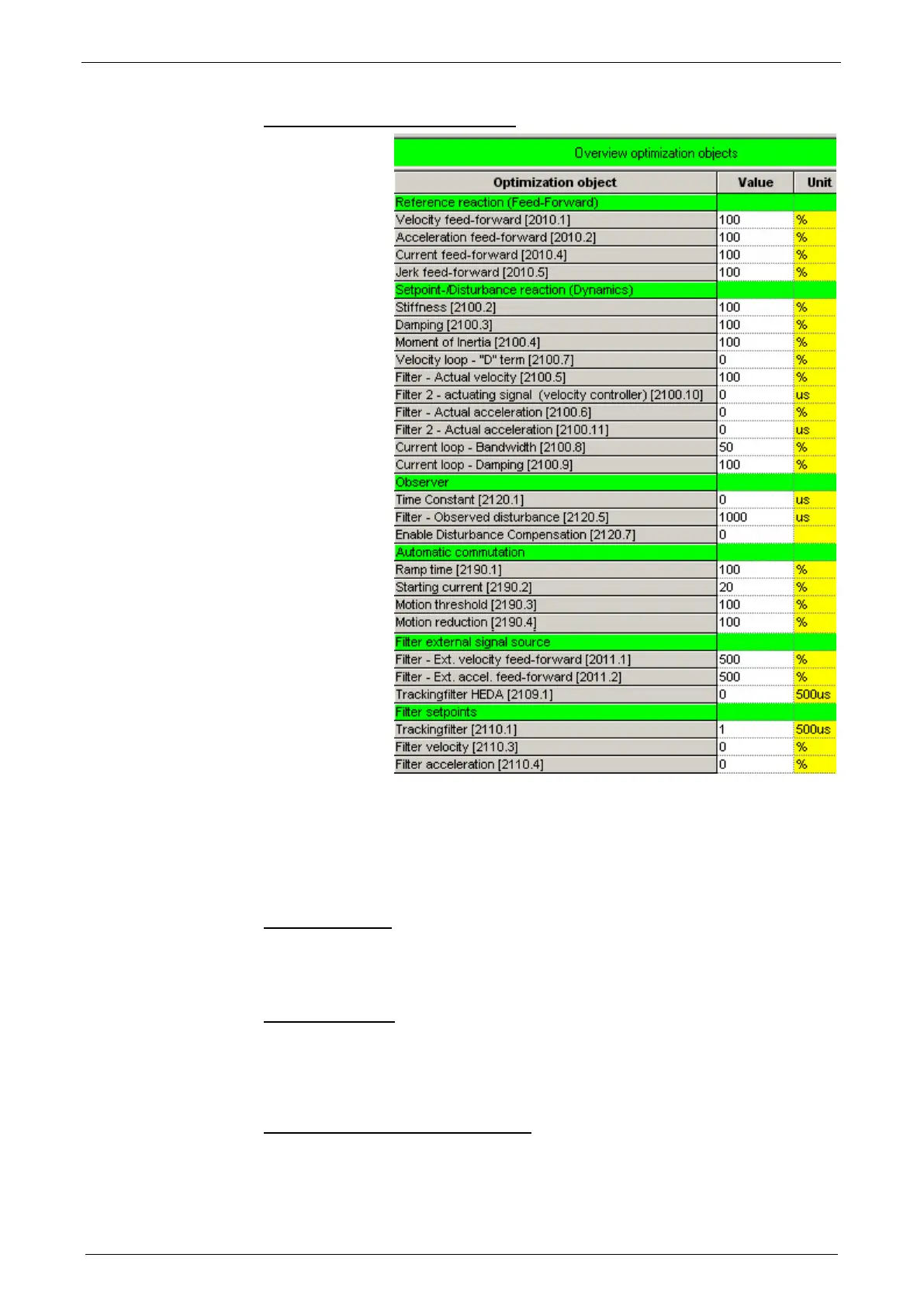
Optimization parameter Advanced
Current controller
The current controller works with a P component in the feedback; this results in
very low overshoot.
With the aid of object 2220.27 (Bit = “0”), it is possible to switch to P component in
the forward path.
EMC feedforward
The EMC feedforward compensates the electromagnetically generated back e.m.f.
of the motor U
EMC
. This signal is proportional to velocity and is deduced from the
setpoint velocity of the setpoint generator.
Motor parameters
Furthermore you can re-optimize the motor parameters inductance, resistance and
EMC (or Kt) in the advanced mode. The LdLqRatio parameter is the ratio of the
smallest and the highest inductance value of the winding, measured during one
motor revolution.
Filter "External Command Interface"
Signal filtering with external command value (see on page 238, see on page
238, see on page 239)