5-16 Determining Basic Drive Configuration SYNAX200
DOK-SYNAX*-SY*-07VRS**-PR01-EN-P
Usable Motors DIAX04:
• MBW (without motor encoder)
• 1MB (without motor encoder)
• 2AD (without motor encoder)
• ADF (without motor encoder)
• MHD (only in connection with motor encoder)
• MKD (only in connection with motor encoder)
• MKE (only in connection with motor encoder)
• MBS (only in connection with motor encoder)
Basic Drive Configuration HS45 (DIAX04):
Read and follow
Instructions for Electrical Drives"
manual,
DOK-GENERL-DRIVE******-SVS...
DANG
High oltage.
Danger of electrical shock.
Do not touch electrical connections
fo
5 minutes after switching
LWL
U1 (DSS)
U2 (DAG)
MBW
2AD
ADF
1MB
IKS4142
SY7PR094.FH7
EnDat encoder
e.g., Heidenhain
EnDat
Fig. 5-19: Drive with MBW, 2AD, ADF or 1MB motor with direct absolute position
detection
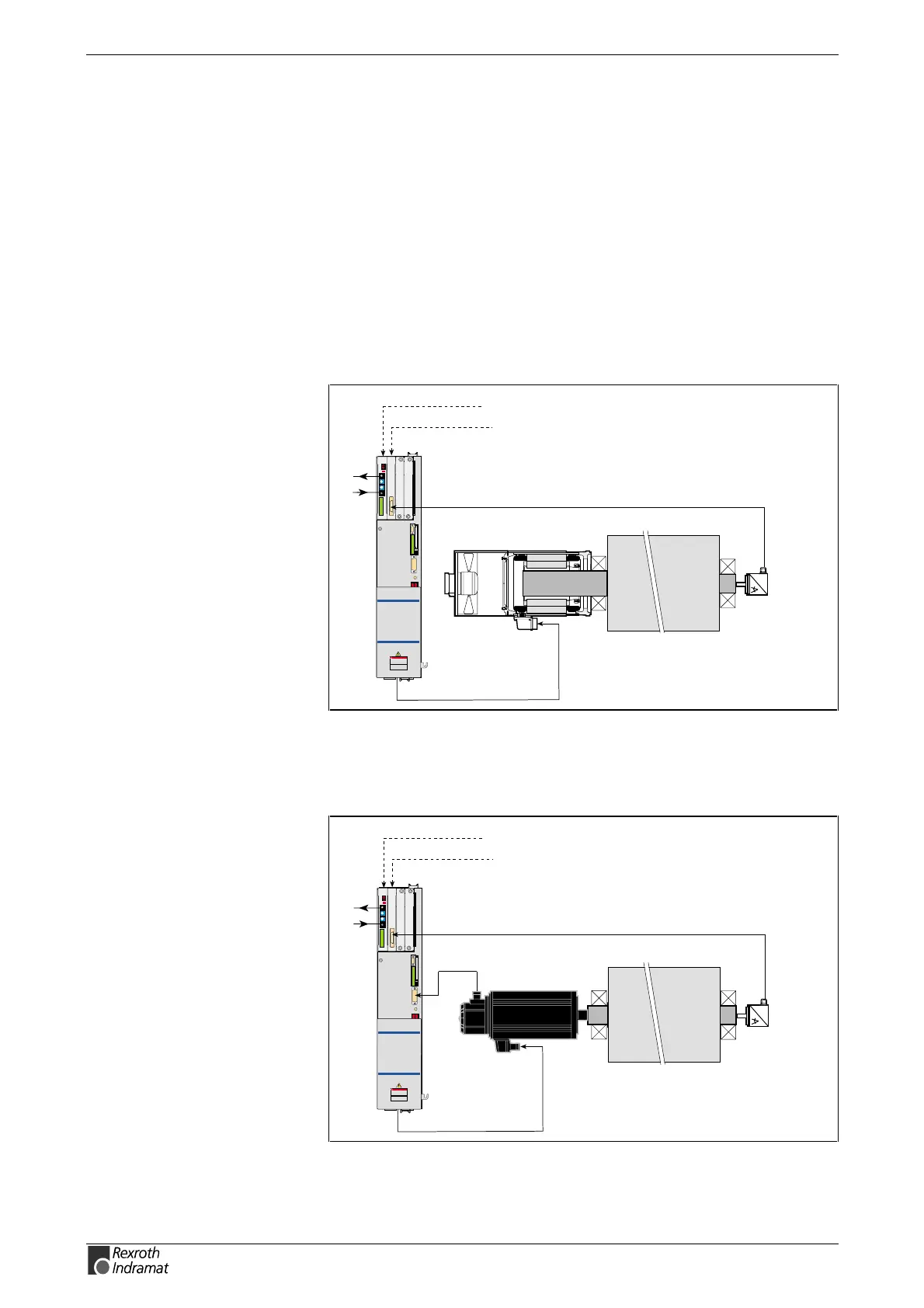
Basic Drive Configuration HS32 (DIAX04):
Read and follow
Instructions for Electrical Drives"
manual,
DOK-GENERL-DRIVE******-SVS...
DANG
High oltage.
Danger of electrical shock.
Do not touch electrical connections
fo
5 minutes after switching
LWL
U1 (DSS)
U2 (DAG)
MHD
MKD
MKE
MBS
IKS 4374
IKS 4142
SY7PR095.FH7
EnDat encoder
e.g., Heidenhain
EnDat
Fig. 5-20: Drive with MHD, MKD, MKE or MBS motor with direct absolute position
detection
MBW, 2AD, ADF, 1MB:
MHD, MKD, MKE, MBS: