2.2 MP2100M System Configuration
2-3
2
2.2 MP2100M System Configuration
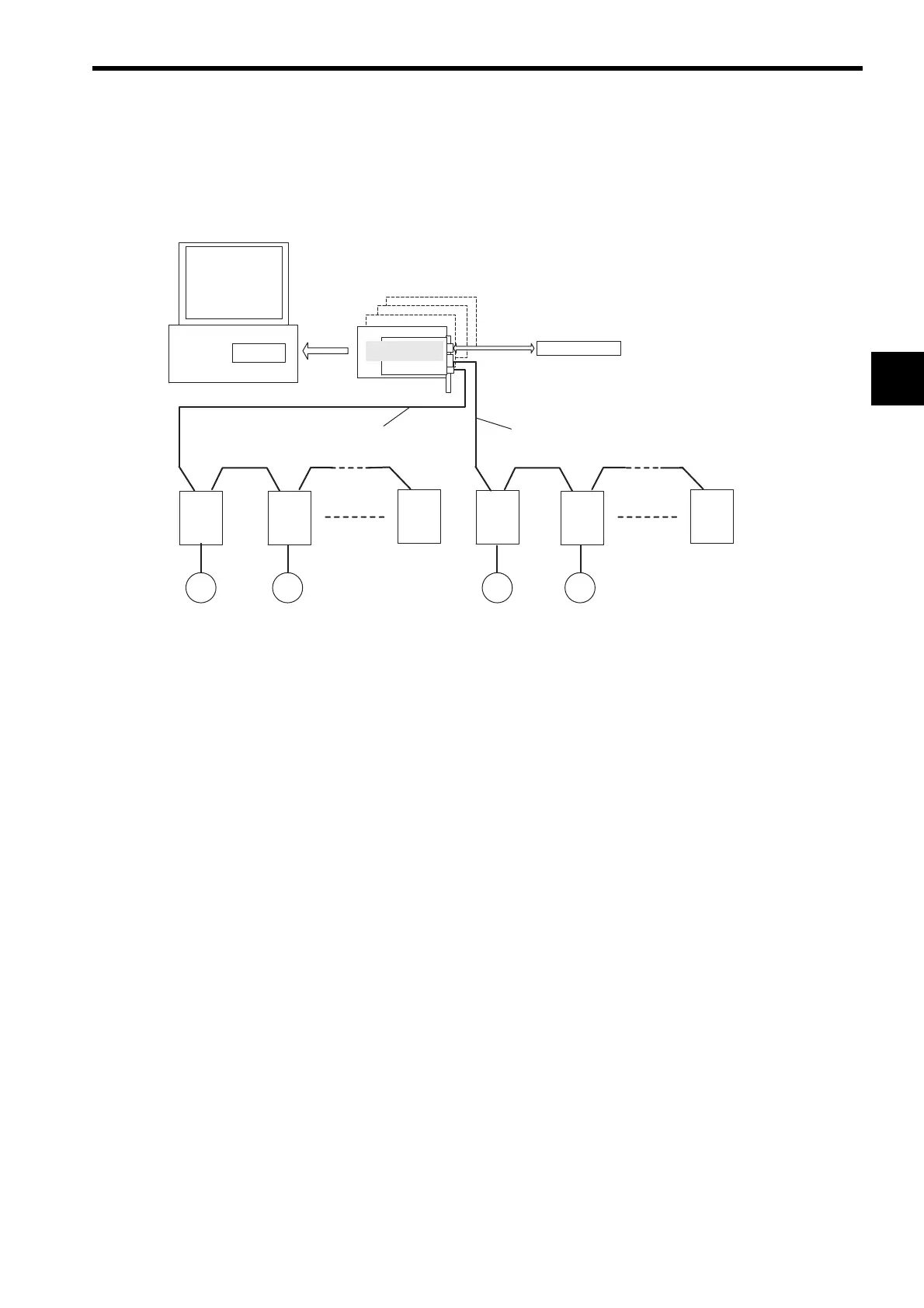
2.2.1 MP2100M Basic System Configuration
The following diagram shows the basic system configuration of the MP2100M.
2.2.2 Precautions
The following precautions must be followed when designing a system using the MP2100M.
• Use MPE720 Ver. 5.10 or higher and Motion API Ver. 1.05 (driver: Ver. 1.1.3.0) or higher.
• Use the connecting cables and connectors recommended by Yaskawa.
Yaskawa has a range of cables. Always check the device to be used and select the correct cable for the
device.
• Different SERVOPACKs are connected to MECHATROLINK-I and MECHATROLINK-
II.
Refer to the list and select the appropriate SERVOPACKs.
• If devices compatible with MECHATROLINK-I (4 Mbps) and with MECHATROLINK-
II (
10 Mbps) are
used together, make the all settings for MECHATROLINK-I (4 Mbps).
• When connecting SERVOPACKs via MECHATROLINK, connect the overtravel, zero point return decel-
eration limit switch and external latch signals to the SERVOPACKs.
SGDS
M
M
IO2310
Input: 5 points (interrupt inputs, etc.)
Output: 4 points
Direct I/O
4 boards max.
SGDSSGDS
M
M
IO2310SGDS
MP2100M
SVB Module
MECHATROLINK-II
• 4 stations max. (communication cycle: 0.5 ms)
• 9 stations max. (communication cycle: 1 ms)
• 15 stations max. (communication cycle: 1.5 ms)
• 21 stations max. (communication cycle: 2 ms)
Up to 16 SERVOPACK or Inverter axes
• 9 stations max. (communication cycle: 1 ms)
• 21 stations max. (communication cycle: 2 ms)
Up to 16 SERVOPACK or Inverter axes
Host computer
MPE720
Motion API
SVB built into CPU Module
MECHATROLINK-II
 Loading...
Loading...





