8 Motion Commands
8-36
8.6 Latch (LATCH)
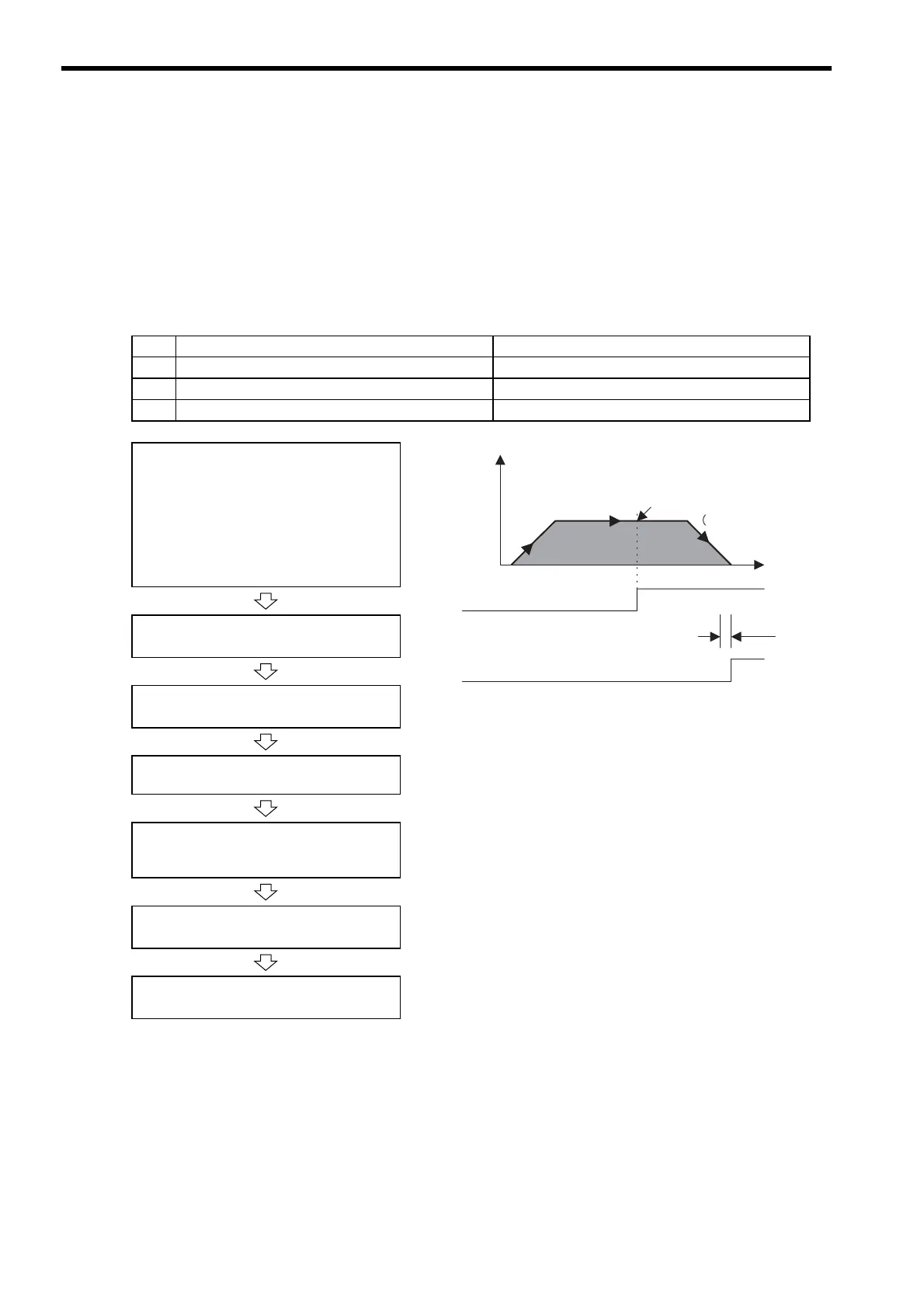
The LATCH command saves in a register the current position when the latch signal is detected during interpola-
tion positioning.
The latch signal type is set in setting register OW
04 and can be set to the phase-C pulse or the /EXT1, /
EXT2, or /EXT3 signal.
When executing the LATCH command more than once, change the Motion Command to NOP for at least one
scan before executing LATCH again.
(1) Operating Procedure
(2) Holding and Aborting
The axis will decelerate to a stop if there is no change in the target position each high-speed scan.
The Command Pause bit (OB
090) and the Command Abort bit (OB
091) cannot be used.
No. Execution Conditions Confirmation Method
1 There are no alarms. Both IL
02 and IL
04 are 0.
2 The Servo ON condition. IB
001 is ON.
3 Motion command execution has been completed. IW
08 is 0 and IB
090 is OFF.
Set the motion setting parameters.
• Target Position: OL
1C
• Acceleration/Deceleration Filter Type:
OW
03
• Speed Loop P/PI Switch: OW
01
• Speed Feed Forward: OW
30
• Latch Signal Selection: OW
04
• Speed feed forward can be applied.
• Generate the target position data each high-speed scan from the
ladder program.
• The travel speed is calculated automatically.
• The Command Pause (OB
090) cannot be used.
• The Command Abort (OB
091) cannot be used.
• Change a motion command to stop interpolation execution.
• Select the latch signal from the SERVOPACK phase-C pulse, /
EXT1, /EXT2, or /EXT3.
Execute the LATCH motion command.
• Set OW
08 to 6.
Positioning starts.
• IW
08 will be 6 during execution.
Change the Target Position (OL
1C)
every high-speed scan.
When the latch signal turns ON, the current
position will be stored in the Register
(IL
18).
Positioning Completed
• IB
0C1 will turn ON.
Execute NOP motion command.
• Set OW
08 to 0.
Position
Speed
(%)
Time (t)
0
Positioning Completed Range
POSCOMP
This position is stored.
IL18)
Latch Signal
 Loading...
Loading...





