11.2 Motion Parameters
11-5
11
11.2 Motion Parameters
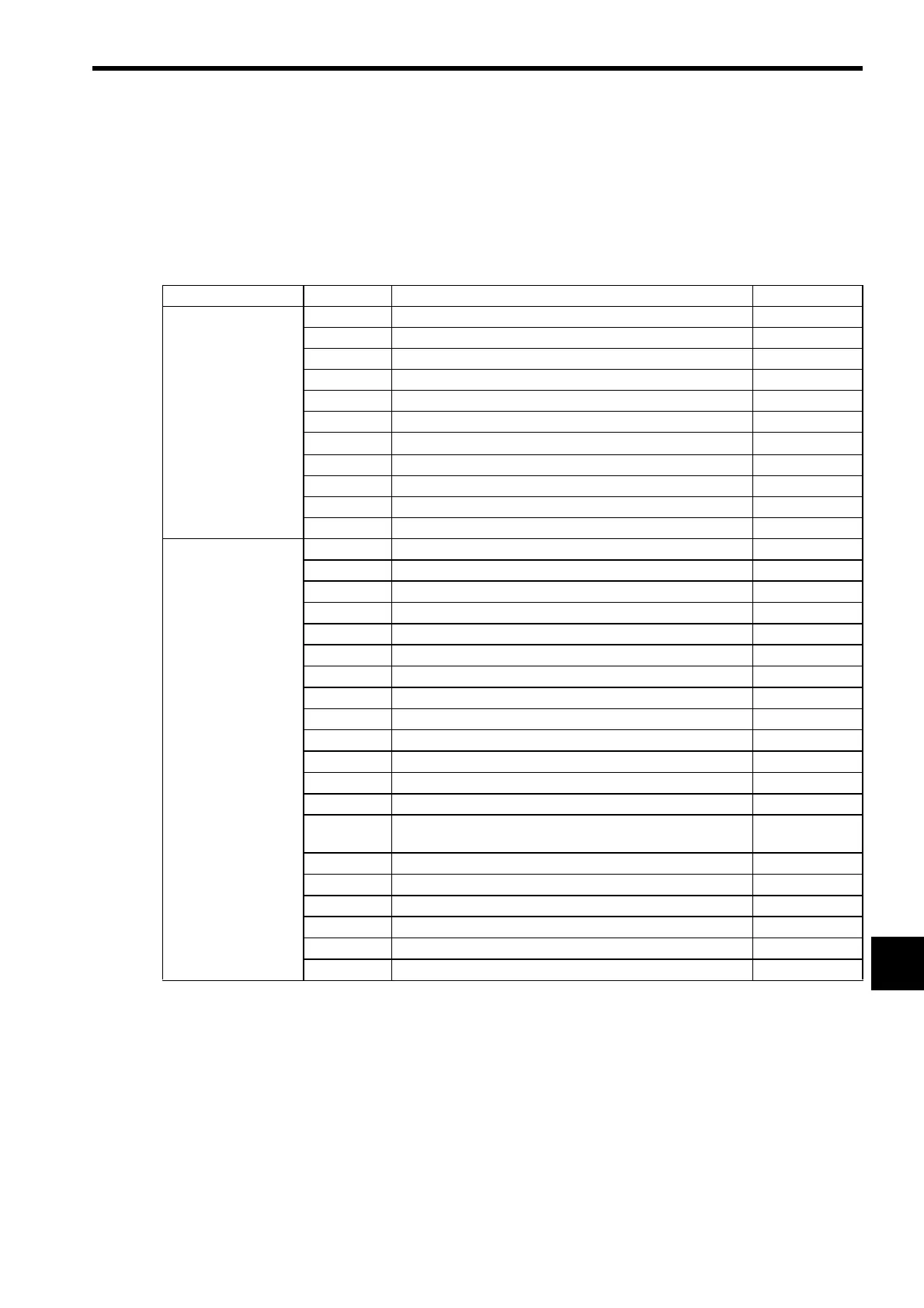
The following table gives motion parameters used by the SVR and the default values of the parameters.
11.2.1 Motion Parameter Details
Type No. Name Default Value
Fixed Parameters 0 Run Mode 1
1 Function Selection 1 0000 Hex
4 Command Unit 0
5 Number of Decimal Places 3
6 Command Unit per Revolution 10,000
8 Gear Ratio [MOTOR] 1
9
Gear Ratio [LOAD]
1
10 Maximum Value of Rotary Counter (POSMAX) 360,000
34 Rated Speed 3,000
36 Encoder Resolution 65,536
42 Feedback Speed Moving Average Time Constant 10
Setting Parameters OW
00 Run Commands 0000 Hex
OW
03 Function 1 0011 Hex
OW
08 Motion Command 0
OW
09 Motion Command Options 0000 Hex
OW
0A Motion Subcommand 0
OL
0C Torque Reference 0
OL
10 Speed Reference 3,000
OL
16 Secondly Speed Compensation 0
OL
1C Position Reference Type 0
OW
31 Speed Amends 0
OL
36 Linear Acceleration Time 0
OL
38 Linear Deceleration Time 0
OW
3A S-Curve Acceleration Time 0
OW
3B Bias Speed for Exponential Acceleration/Deceleration
Filter
0
OW
3D Home Window 100
OL
44 Step Distance 1,000
OL
48 Zero Point Offset 0
OL
4A Work Coordinate System Offset 0
OL
4C Preset Data of POSMAX Turn 0
OL
5C Fixed Parameter Number 0
 Loading...
Loading...





