8.26 Change Position Loop Integration Time Constant (KIS)
8-85
8
8.26 Change Position Loop Integration Time Constant (KIS)
The KIS command transfers the setting of the Position Integration Time Constant (motion setting parameter
OW
32) to the Position Loop Integration Time Constant in the SERVOPACK and enables the setting.
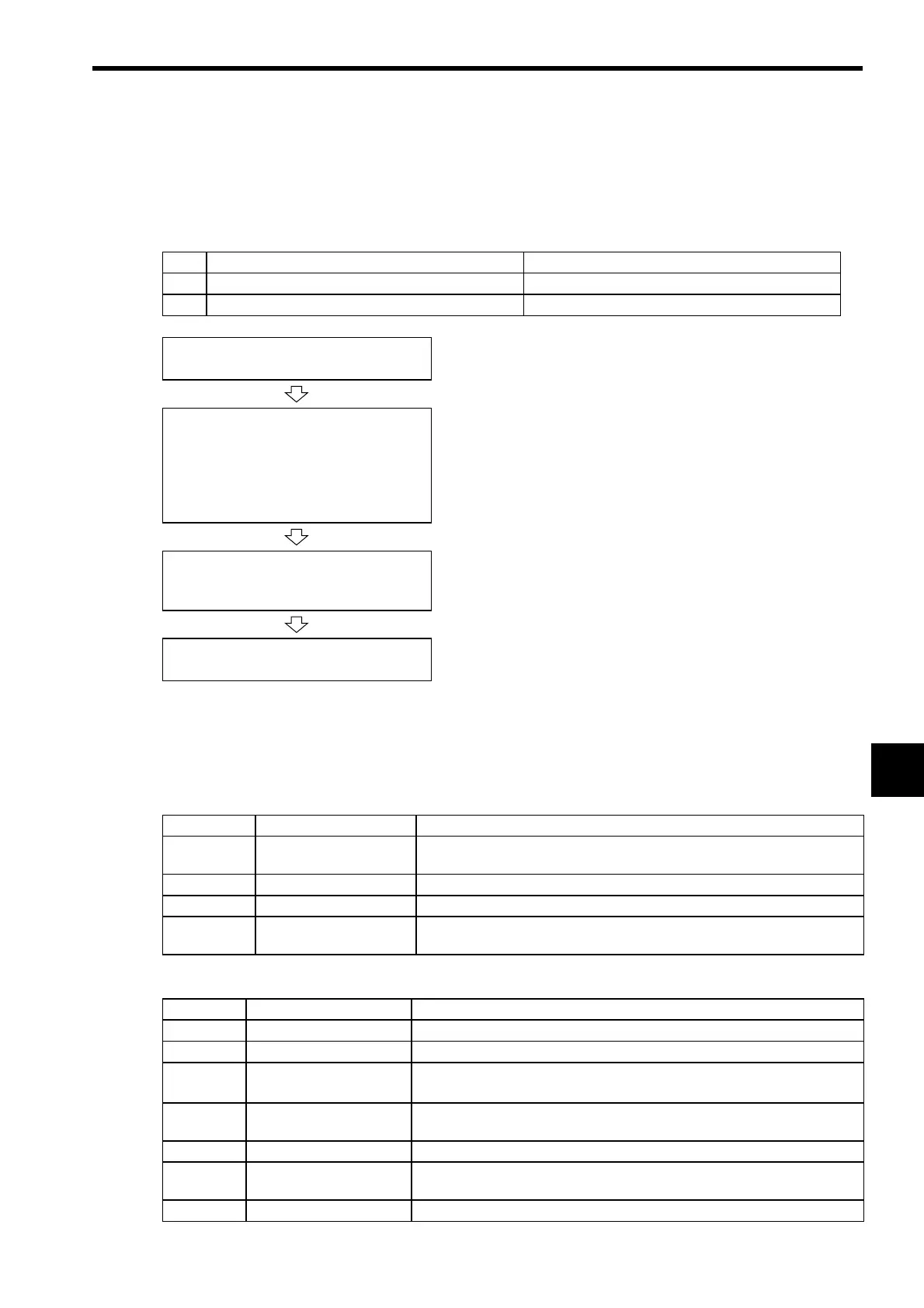
(1) Operating Procedure
(2) Holding and Aborting
The Command Pause bit (OB
090) and the Command Abort bit (OB
091) cannot be used.
(3) Related Parameters
(a) Setting Parameters
(b) Monitoring Parameters
No. Execution Conditions Confirmation Method
1 There are no alarms. Both IL
02 and IL
04 are 0.
2 Motion command execution has been completed. IW
08 is 0 and IB
090 is OFF.
Execute the
KIS
motion command.
• Set OW
08 to 26.
• With the MECHATROLINK-II, there is the function that the
change of setting parameter is automatically updated. If utilizing
this function, there is no need to execute KIS command. For
details, refer to 7.2.1 Motion Fixed Parameter Details.
• The Command Pause (OB
090) cannot be used.
• The Command Abort (OB
091) cannot be used.
The Position Loop Integration Time Constant
is set in the SERVOPACK and enabled.
• IW
08 will be 26 during command
execution.
• IB
090 will be ON during command
execution.
Parameter change completed.
• IW
08 will be 26 and IB
090 will be
OFF.
Execute NOP motion command.
• Set OW
08 to 0.
Parameter Name Setting
OW
08 Motion Command The integration time constant for the position loop is changed when this
parameter is set to 26.
OB
090 Command Pause This parameter is ignored for KIS command.
OB
091 Command Abort This parameter is ignored for KIS command.
OW
32 Position Integration
Time Constant
Set the integration time constant for the position loop in milliseconds.
Parameter Name Monitor Contents
IL
02 Warning Stores the most current warning.
IL
04 Alarm Stores the most current alarm.
IW
08 Servo Command Type
Response
Indicates the motion command that is being executed.
The response code will be 26 during KIS command execution.
IB
090 Command Executing Turns ON during KIS command execution and turns OFF when execution has
been completed.
IB
091 Hold Completed Always OFF for KIS command.
IB
093 Command Error End Turns ON if an error occurs during KIS command execution. Turns OFF when
another command is executed.
IB
098 Command Completed Turns ON when KIS command execution has been completed.
 Loading...
Loading...





