11.3 Motion Commands
11-17
11
11.3 Motion Commands
The SVR reads and writes motion parameters and executes commands at the beginning of the high-speed scan.
11.3.1 Motion Command Table
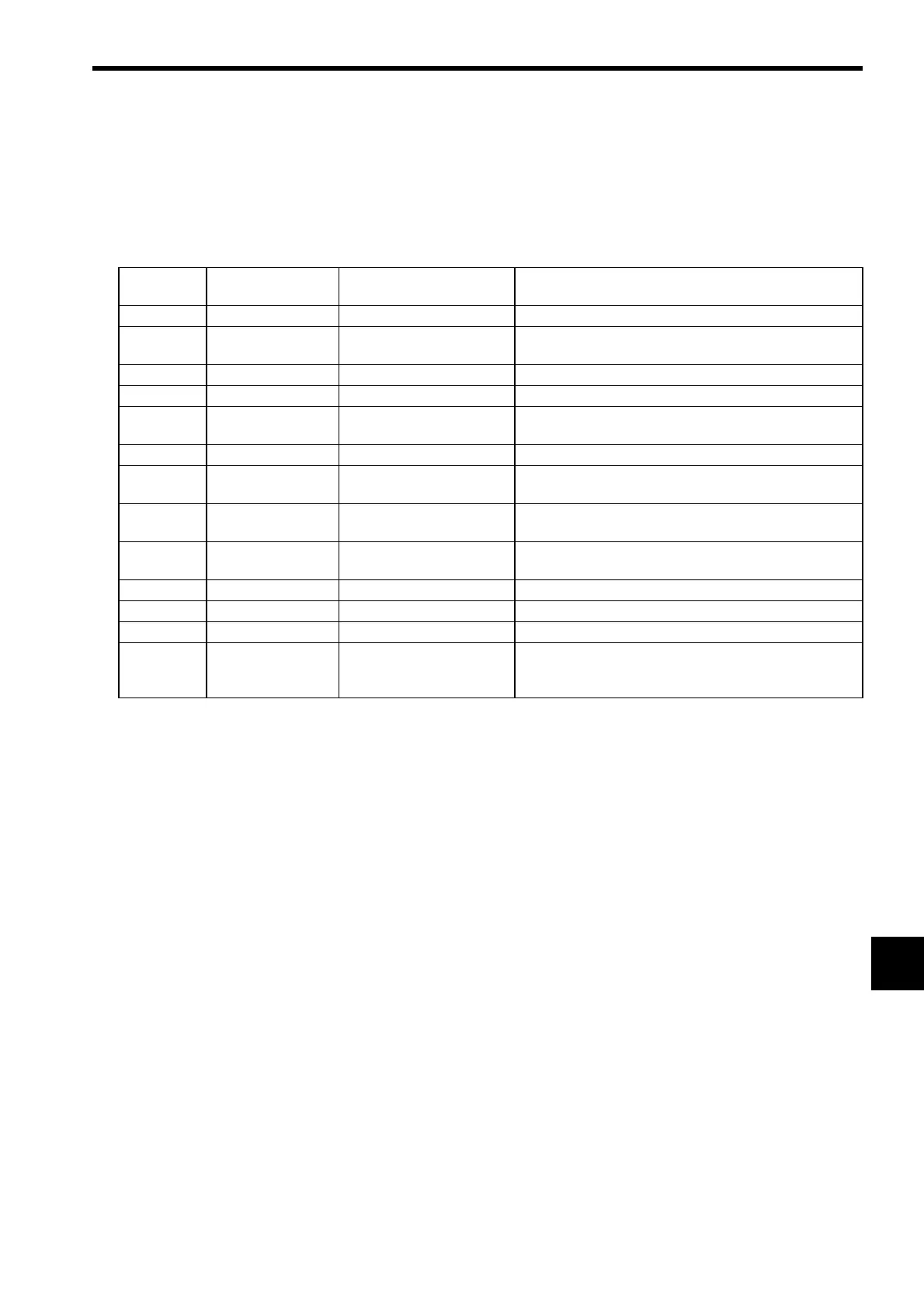
The following table lists the motion commands that can be used with the SVR.
Command
Code
Command Name Overview
0 NOP No command
1 POSING Positioning Positions to the specified position using the specified
acceleration/deceleration times and the specified speed.
2 EX_POSING External Positioning Performs the same operation as the POSING command.
3 ZRET Zero Point Return Sets the zero point in the machine coordinate system.
4 INTERPOLATE Interpolation Performs interpolation feeding using positioning data
distributed consecutively from the CPU Module.
5 − Reserved by system.
6LATCH Latch Performs the same operation as the INTERPOLATE
command.
7 FEED JOG Operation Moves the axis at the specified speed in the specified
direction until the command is canceled.
8 STEP STEP Operation Positions the specified travel distance in the specified
direction at the specified speed.
9 ZSET Zero Point Setting Sets the zero point in the machine coordinate system.
23 VELO Speed Reference The SVR does not support a speed control function.
24 TRQ Torque Reference The SVR does not support a torque control function.
25 PHASE Phase Reference Performs the same operation as the JOG operation. An
acceleration/deceleration function, however, is not
supported.
 Loading...
Loading...





