13.3 Motion Errors
13-29
13
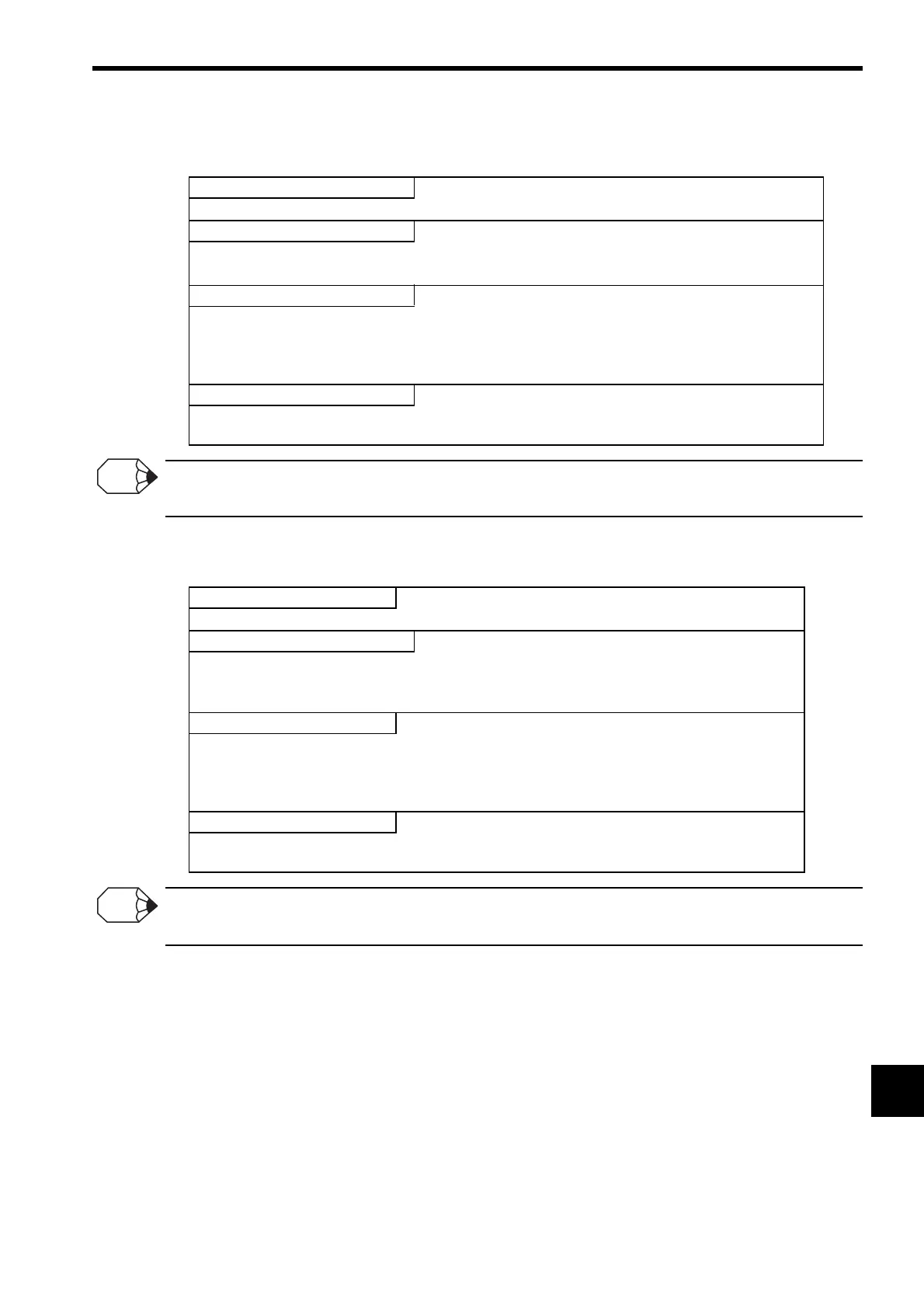
(11) Filter Type Change Error (IL04, bit 10)
The command will not stop even if the above error occurs. Perform stop processing from the user program to stop com-
mands when necessary.
(12) Filter Time Constant Change Error (IL04, bit 11)
The command will not stop even if the above error occurs. Perform stop processing from the user program to stop com-
mands when necessary.
Detection Timing
• Continuously monitored by the motion command processing section.
Processing when Alarm Occurs
• The Change Filter Type command will not be executed.
• The Command Execution End with Error bit in the Motion Command Status (
IW09,
bit
3
) will turn ON.
Error and Cause
• For an interpolation command (Interpolation or Latch), the Change Filter Type command was executed
before pulse distribution could be completed (i.e., when
IB0C0
was OFF).
• The Change Filter Type command is ignored and an error will not occur during positioning (commands for
positioning, external positioning, STEP operation , JOG operation etc.).
Correction
• Correct the program to detect Distribution Completed status (i.e., that
IB0C0
is
ON
) before executing the
Change Filter Type command.
INFO
Detection Timing
• Continuously monitored by the motion command processing section.
Processing when Alarm Occurs
• The Change Filter Time Constant command will not be executed.
• The Command Execution End with Error bit in the Motion Command Status (
IW09,
bit
3
) will turn
ON.
Error and Cause
• For an interpolation command (Interpolation or Latch), the Change Filter Time Constant command was
executed before pulse distribution could be completed (i.e., when
IB0C0
was OFF).
• The Change Filter Time Constant command is ignored and an error will not occur during positioning
(commands for positioning, external positioning, STEP operation, JOG operation etc.).
Correction
• Correct the program to detect Distribution Completed status (i.e., that
IB0C0
is
ON
) before executing
the Change Filter Time Constant command.
INFO
 Loading...
Loading...





