General specifications
Manual b maXX
®
BM1000
Document No. 5.07003.04 Baumüller Nürnberg GmbH
144
of 174
D.4
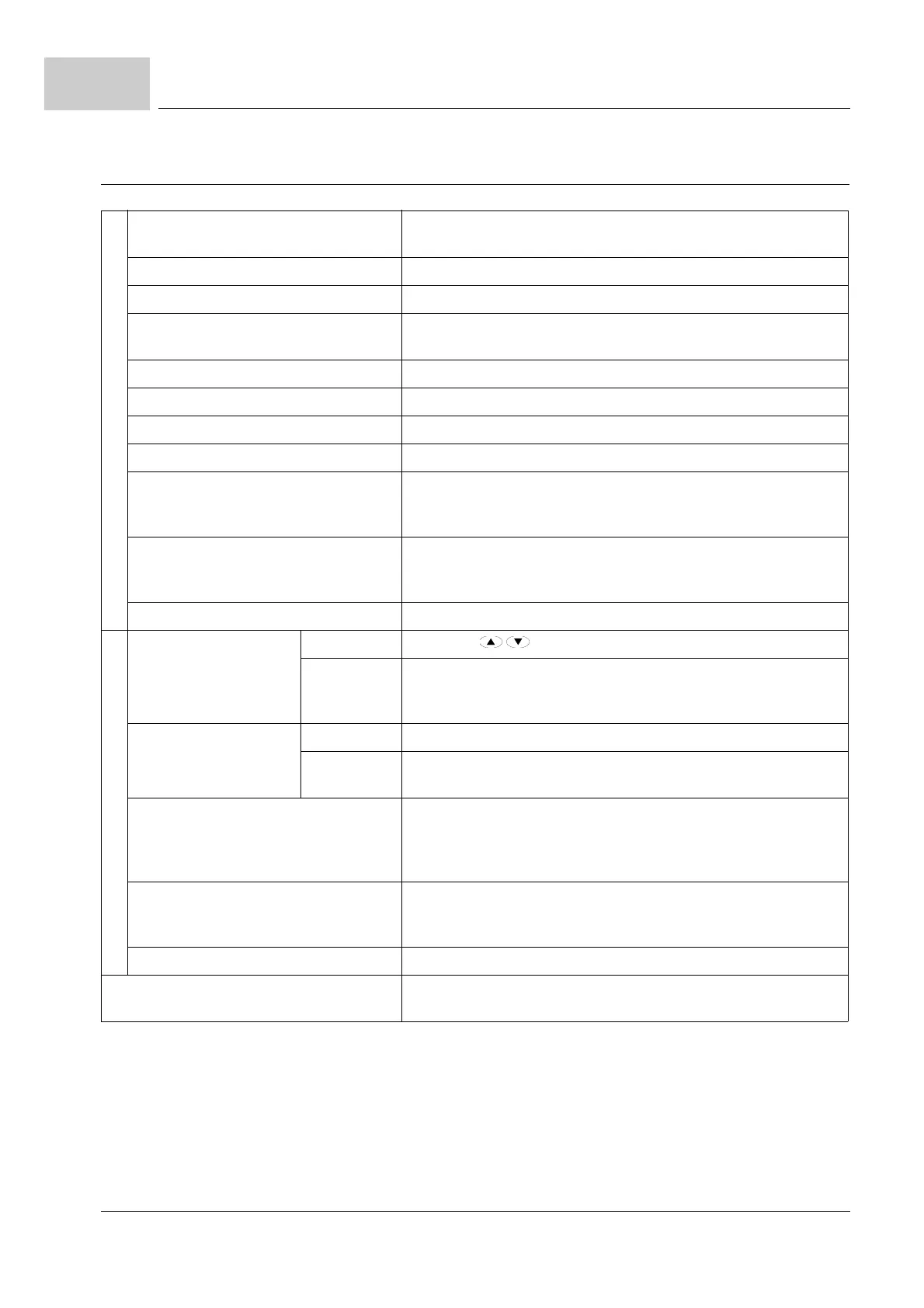
D.4 General specifications
Control characteristics
Control system SPWM (Sinusoidal Pulse Width Modulation) control
(V/f or sensorless vector control)
Frequency setting resolution 0.01 Hz
Output frequency resolution 0.01 Hz
Torque characteristics Including the auto-torque/auto-slip compensation; starting
torque can be 150 % at 3.0 Hz
Overload endurance 150 % of rated current for 1 minute
Skip frequency Three zones, setting range 0.1 to 600 Hz
Acceleration/deceleration time 0.1 to 600 seconds (2 Independent settings for accel/decel time)
Stall prevention level Setting 20 to 250 % of rated current
DC braking Operation frequency 0.1 to 600.0 Hz, output 0 to 100 % rated
current
Start time 0 to 60 seconds, stop time 0 to 60 seconds
Regenerated braking torque Approximately 20 % (up to 125 % possible with optional braking
resistor or externally mounted chopper unit, 2.2 to 11 kW mod
-
els have brake chopper built-in)
V/f pattern Adjustable V/f pattern
Operating characteristics
Frequency setting Keypad Setting by
External
signal
Potentiometer 5 kΩ / 0.5 W, 0 to +10V
DC
, 4 to 20 mA, RS-485
interface;
Multi-function inputs 3 to 9 (15 steps, jog, up/down)
Operation setting signal Keypad Set by RUN and STOP
External
signal
2 wires/3 wires (MI1, MI2, MI3), JOG operation, RS-485 serial
interface (MODBUS), programmable logic controller
Multi-function input signal Multi-step selection 0 to 15, JOG, accel/decel inhibit, 2 accel/
decel switches, counter, external base block, auxiliary motor
control is invalid, ACI/AVI selections, driver reset, UP/DOWN
key settings, NPN/PNP input selection
Multi-function output indication Device operating, frequency attained, zero speed, base block,
fault indication, overheat alarm, emergency stop and status
selections of input terminals
Analog output signal Output frequency/current
Alarm output contact Contact will be on when drive malfunctions (1 form c/change-
over contact and 1 open collector output for standard type)