Setup & Operation 1. Specifications
10 RC620 Rev.8
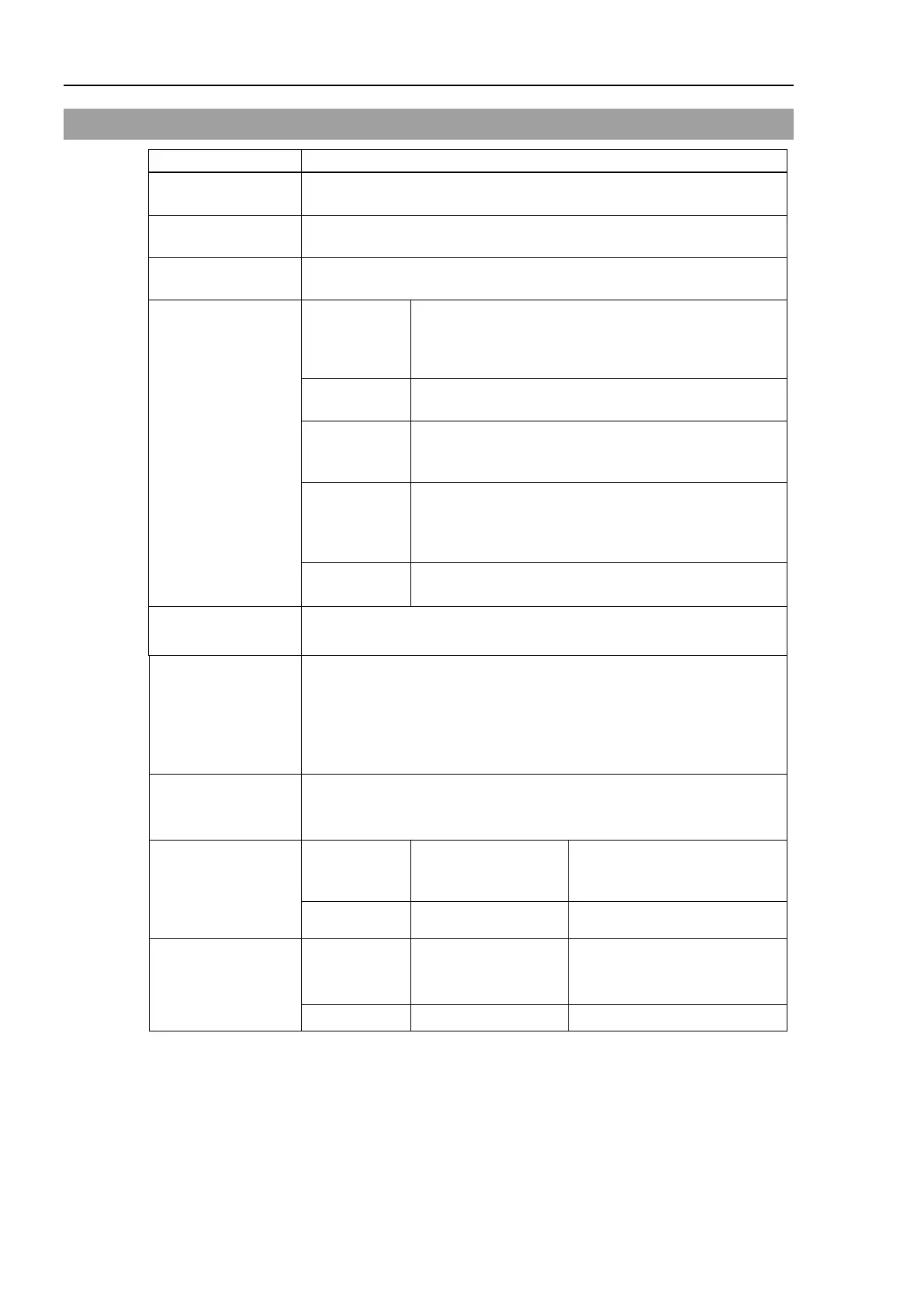
1.2 Standard Specifications
Model
Robot Controller RC620 control unit
(UL specification: RC620-UL)
CPU
Standard : Intel® Celeron
TM
M Processor
High-speed (option) : Intel® Core
TM
Controllable axes
Up to eight (8) connectable AC servo motors
(Limited by the total motor power.)
Robot manipulator
control
language and
Robot control
EPSON RC+ 6.0
(a multi-tasking robot language)
Joint Control
Up to eight (8) joints Simultaneous control
Software AC servo control
Speed Control
PTP motion : Programmable in the range of 1 to 100%
CP motion : Programmable (Actual value to be
Acceleration/
deceleration
control
PTP motion : Programmable in the range of 1 to
100%; Automatic
CP motion : Programmable (Actual value to be
manually entered.)
Connectable
Manipulator
Max. 16 units (Max. 20 axes)
Positioning control
PTP (Point-To-Point control)
CP (Continuous Path control)
Memory capacity
Maximum Object Size : 8 MB
Point data area : 1000 points (per file)
Backup variable area : Max. 400 kB (Includes the memory area for
the management table.)
Approx. 4000 variables (Depends on the size
Teaching method
Remote
Direct
External
input/output
signals (standard)
Standard I/O
Input : 24
Output : 16
8 outputs with remote function
assignment change allowed
Standard I/O
(Drive Unit)
per Drive Unit
Communication
interface
(standard)
Ethernet 2 channel
Refer to Setup & Operation:
6.1 LAN (Ethernet
RS-232C 1 or 2 channel Depends on CPU Board