Function Applications
-450-
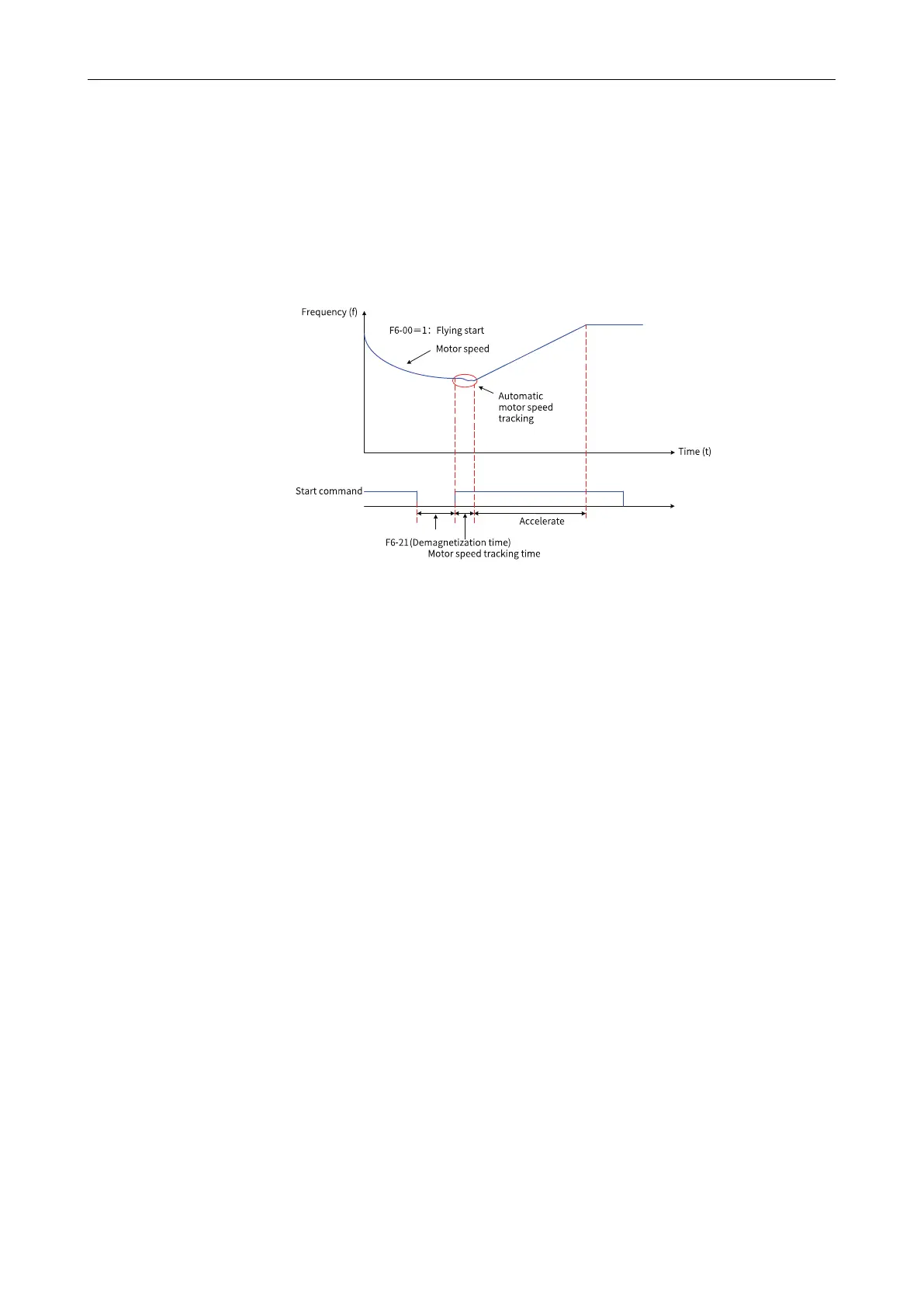
Flying Start
When F6-00 is set to 1, the flying start mode is adopted. The AC drive first determines the speed and
direction of the motor and then starts to run at the tracked motor frequency. This mode applies only to
asynchronous motors. It is applicable when the AC drive is used to drive large-inertia machinery loads.
If the AC drive needs to be started again when the motor is still rotating due to inertia, the flying start
mode can prevent overcurrent at startup. This startup mode is only valid in vector control mode. The
following figure shows the frequency curve during startup.
Figure 4-28 Flying start mode
Pre-excitation Start
When F6-00 is set to 2, the pre-excitation start mode is adopted. This mode is valid only for
asynchronous motors in SVC control mode. Pre-excitation on the motor before startup can improve
fast response of the motor and reduce the starting current. The startup timing is the same as that in
startup with DC injection braking mode. The pre-excitation current is preferably 1.5 times the no-load
current (F1-10), and in no case be greater than the rated current of the motor. If the pre-excitation
current equals the no-load current (F1-10), the optimal pre-excitation time is 3 times the "rotor time
constant". "Rotor time constant" = "Mutual inductance (F1-09) + Leakage inductance (F1-08)"/"Rotor
resistance (F1-07)". The unit of mutual inductance and leakage inductance is L, and the unit of
resistance is Ω. If the pre-excitation current is greater than the no-load current, the pre-excitation time
can be reduced proportionally. If the pre-excitation current is less than the no-load current, the pre-
excitation time can be increased proportionally.
4.1.3.2 Stop Modes
The AC drive supports two stop modes: decelerate to stop and coast to stop. You can set F6-10 to
select a stop mode as required.

 Loading...
Loading...








