8 Commissioning/Shutdown
66 of 212
PumpDrive 2
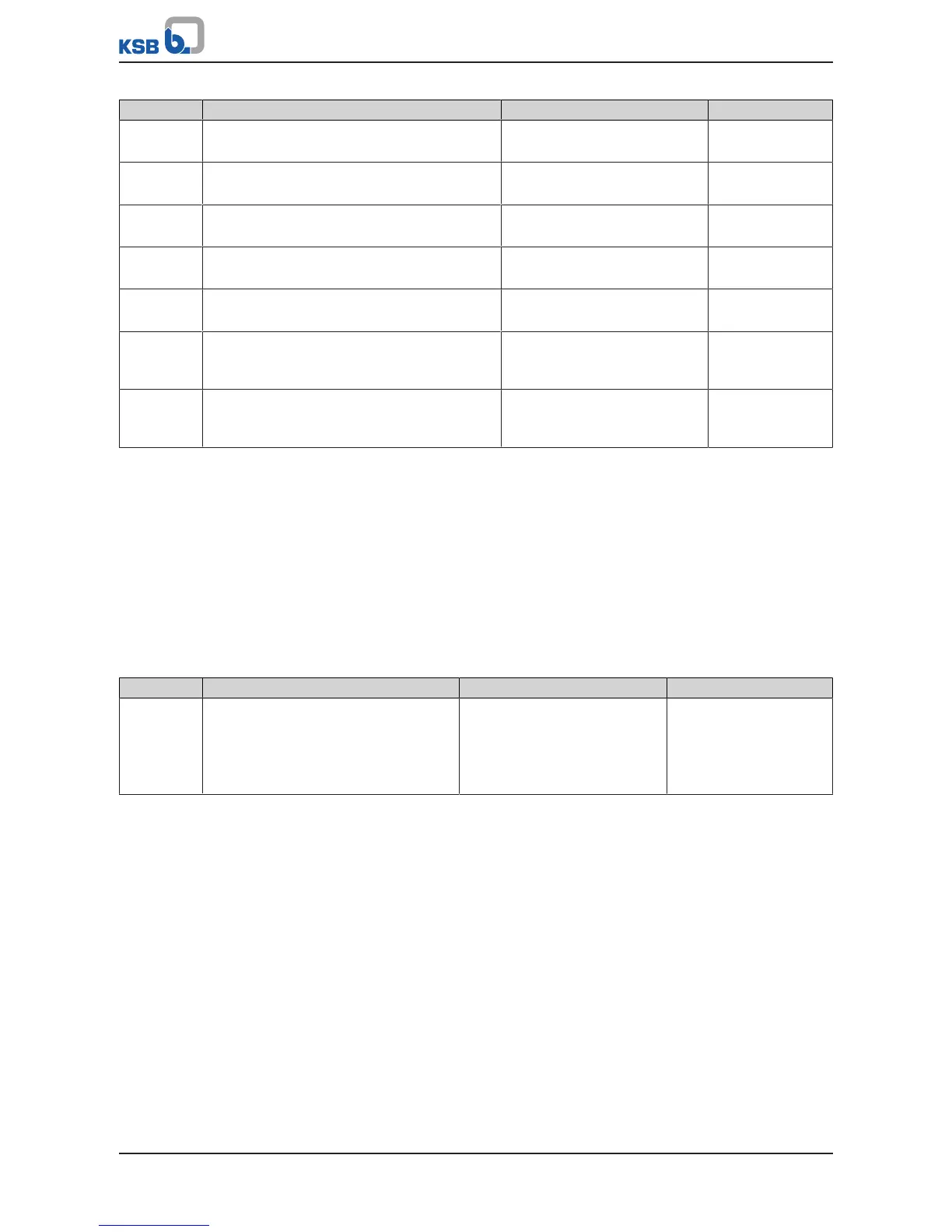
Parameter Description Possible settings Factory setting
3-2-1-5 Nominal Motor Speed
Nominal speed of motor as per name plate
0…4200 rpm Dependent on size/
motor
3-2-1-6 Nominal Cos Phi Value
Cos phi of motor at nominal power
0,00…1,00 Dependent on size/
motor
3-2-2-1 Minimum Motor Speed
Minimum motor speed
0…4200 rpm Dependent on
pump
3-2-2-2 Maximum Motor Speed
Maximum motor speed
0…4200 rpm Dependent on
pump
3-2-3-1 PTC Data Analysis
Motor temperature monitoring
▪ OFF
▪ ON
Dependent on
motor
3-2-3-2 Thermal Motor Protection Behaviour
Behaviour for detection of excessive motor
temperature
▪ Non-self-acknowledging
▪ Self-acknowledging
Non-self-
acknowledging
3-2-4-1 Motor Direction of Rotation
Setting the direction of rotation of the motor with
respect to the motor shaft
▪ Clockwise
▪ Anti-clockwise
Clockwise
8.4 Motor control method
The frequency inverter gives you a choice of several motor control methods:
▪ Vector control method for the KSB SuPremE motor
▪ Vector control method for the asynchronous motor
▪ V/f control method for the asynchronous motor
The V/f control method can be selected for basic applications. For more complex
applications, the vector control method can be used, which offers considerably
higher speed and torque accuracy than the V/f control method. The motor control
method can be set using the Motor Control Method parameter (3-3-1).
Table39: Parameters for control method
Parameter Description Possible settings Factory setting
3-3-1 Motor Control Method
Selecting the control method
▪ SuPremE Vector Control
▪ Asynchronous Motor Vector
Control
▪ Asynchronous Motor V/f
Control
Dependent on motor
Vector control method
No additional settings or adjustments are required for vector control methods. The
extended motor data required for the vector control method is determined by
automatic motor adaptation.
V/f control method
If the V/f control method is selected using the Motor Control Method parameter
(3-3-1), it may be necessary to adapt the preset V/f characteristic (3-3-2), depending
on the application scenario.
By changing the V/f characteristic in accordance with the pump characteristic, the
motor current can be adjusted in line with the required load torque (squared load
torque). By default, the frequency inverter is set to a linear V/f characteristic.
By increasing the first voltage data point V
0
(boost voltage), a higher torque can be
generated if a higher breakaway torque is required.