9. Navigation and guidance system
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 101
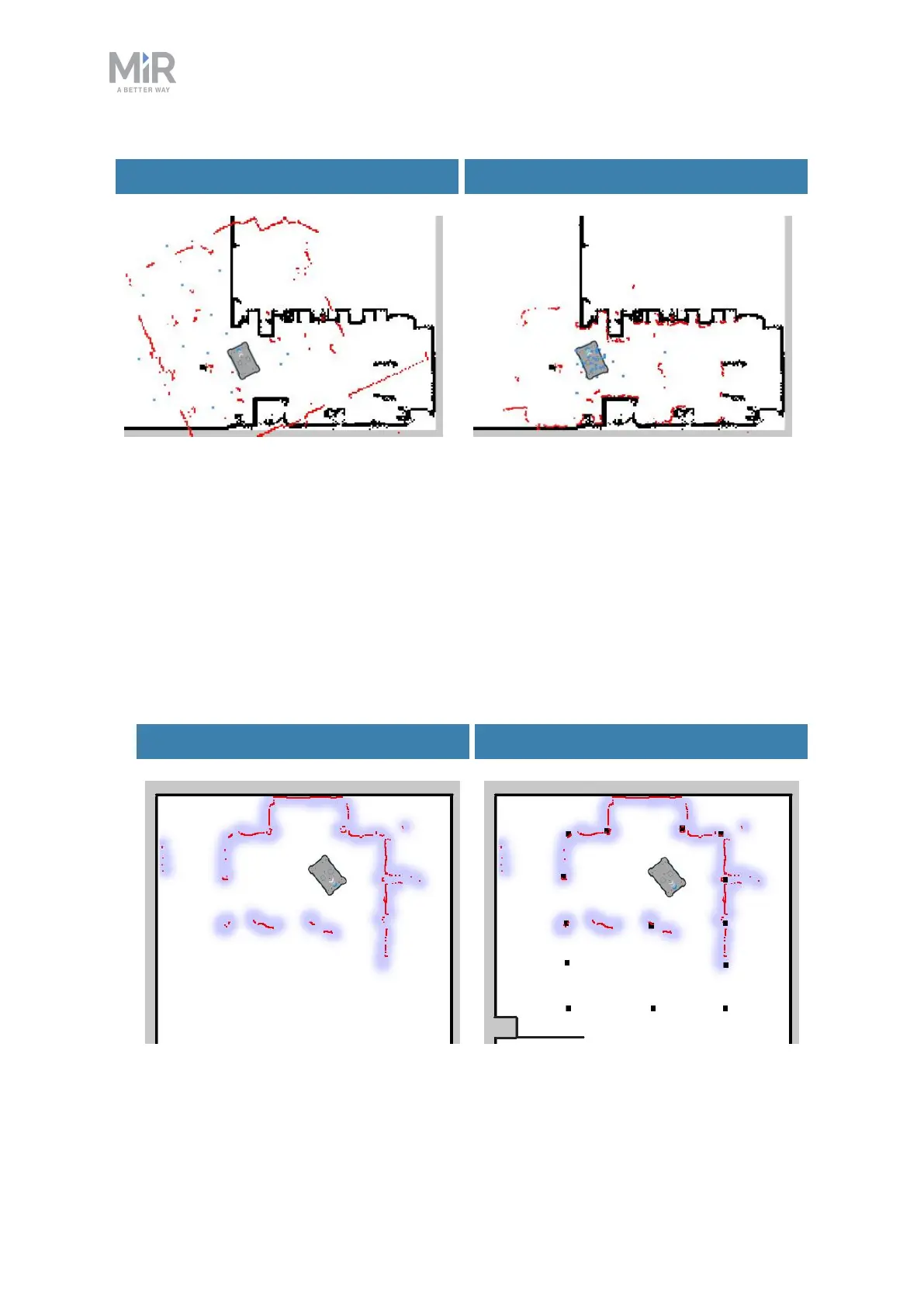
Failed localization Successful localization
Figure 9.11. In a failed localization, the robot cannot determine a position where the red lines
(laser scanner data) align with the black lines on the map. When the robot can localize itself, it
determines a cluster of likely positions, indicated in the images above as blue dots.
To make sure the robot can localize itself well using particle filtering, consider the
following when creating a map:
•
There must be unique and distinguishable static landmarks on the map that
are easily recognizable. A landmark is a permanent structure that the robot
can use to orient itself, such as corners, doorways, columns, and shelves.
No distinguishable landmarks Many distinguishable landmarks