12. Usage
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 198
•
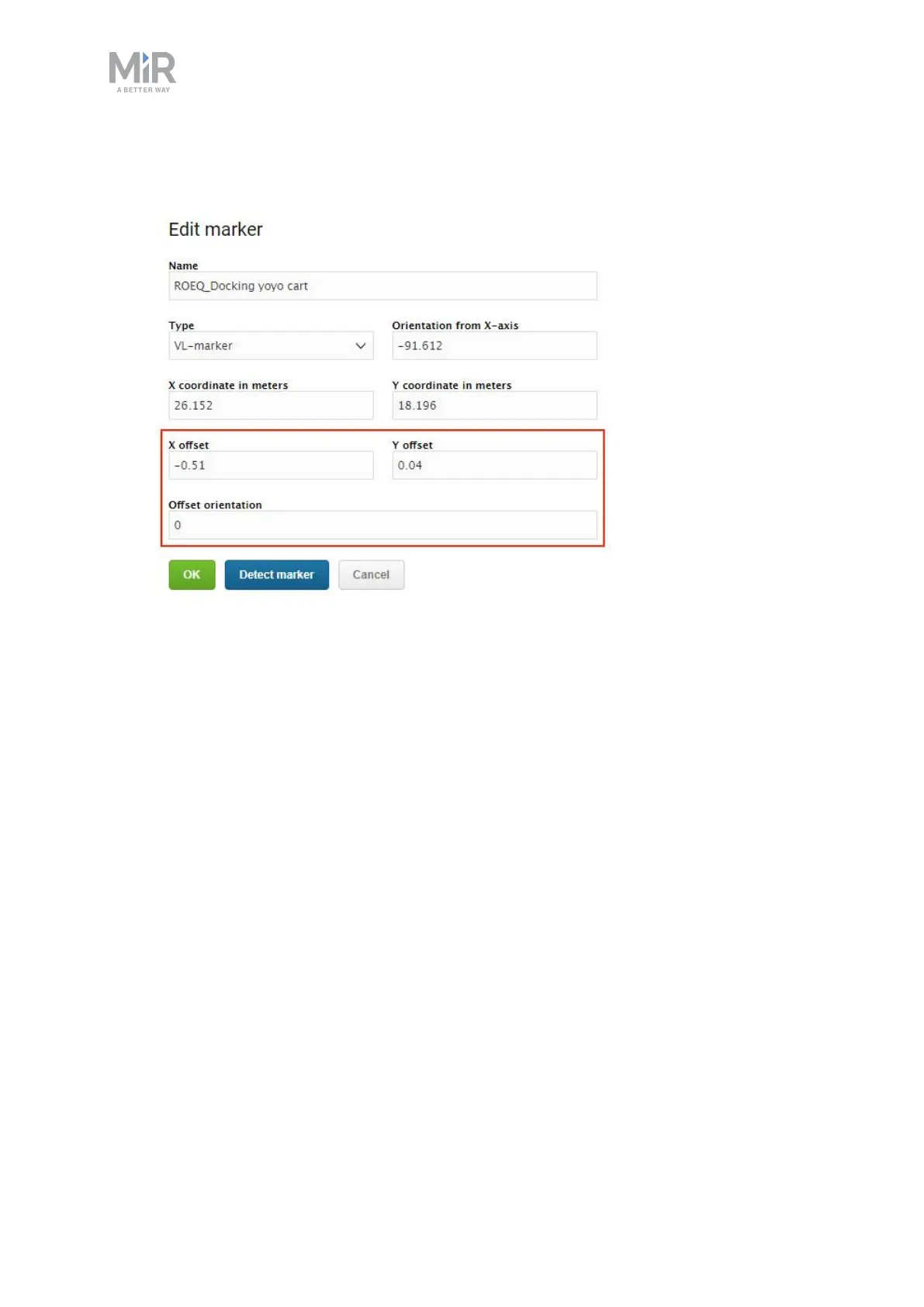
To change where the robot stops relative to the marker, you can adjust the
offsets.
•
The X-offset moves the robot closer to or further from the marker in
meters.
•
The Y-offset moves the robot further to the left or right of the marker in
meters.
•
The orientation offset changes the final orientation of the robot in
degrees.