12. Usage
MiR1350 User Guide (en) 05/2022 - v.1.2 ©Copyright 2021-2022: Mobile Industrial Robots A/S. 218
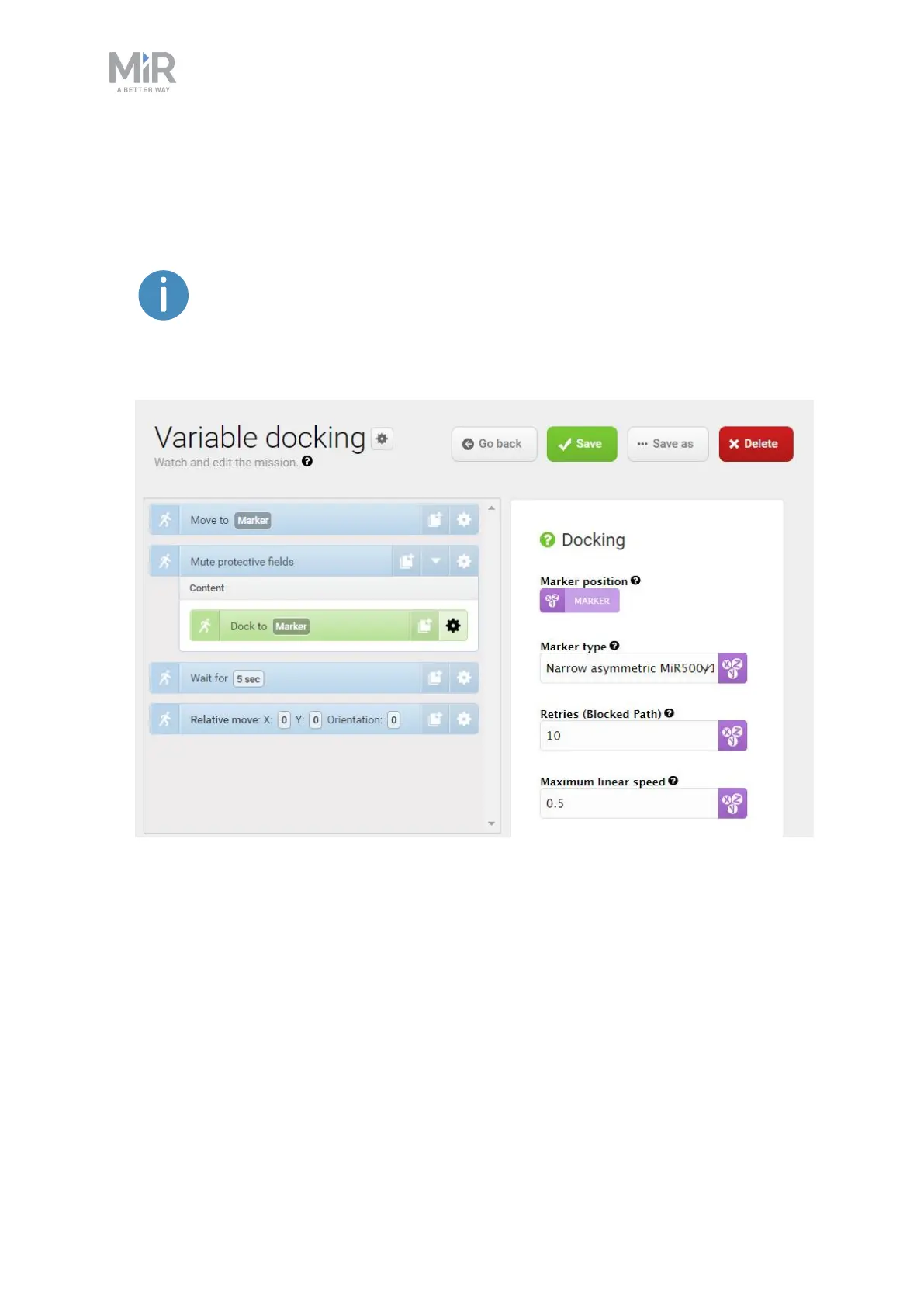
6. Drag the Docking action into the Mute protective fields action, and under
Marker position, create another variable titled Marker.
If two variables share the same name, the value you select for
that variable will be applied both places. In this case, by using the
variable Marker in two places, you ensure that the robot docks to
the same marker that it moved to in the first action.