10
FUNCTIONS AND PROGRAMMING
10.2 Programming Using Bus Interface Functions
10.2.1 Bus interface function list
10 - 6
9
UTILITY OPERATION
10
FUNCTIONS AND
PROGRAMMING
11
OVERVIEW OF
MULTIPLE CPU
SYSTEM
12
MULTIPLE CPU
SYSTEM
CONFIGURATION
13
MULTIPLE CPU
SYSTEM
CONCEPT
14
COMMUNICATIONS
BETWEEN CPU
MODULES
15
PARAMETERS
ADDED FOR
MULTIPLE CPU
16
PRECAUTIONS FOR
USE OF AnS SERIES
MODULE
* 1 If the address indicated by the pointer of the argument is illegal, the return value of the function is
a pointer address specification error (return value -28628).
POINT
For details of the bus interface functions, refer to the Bus Interface Function HELP
of SW PVC-CCPU.
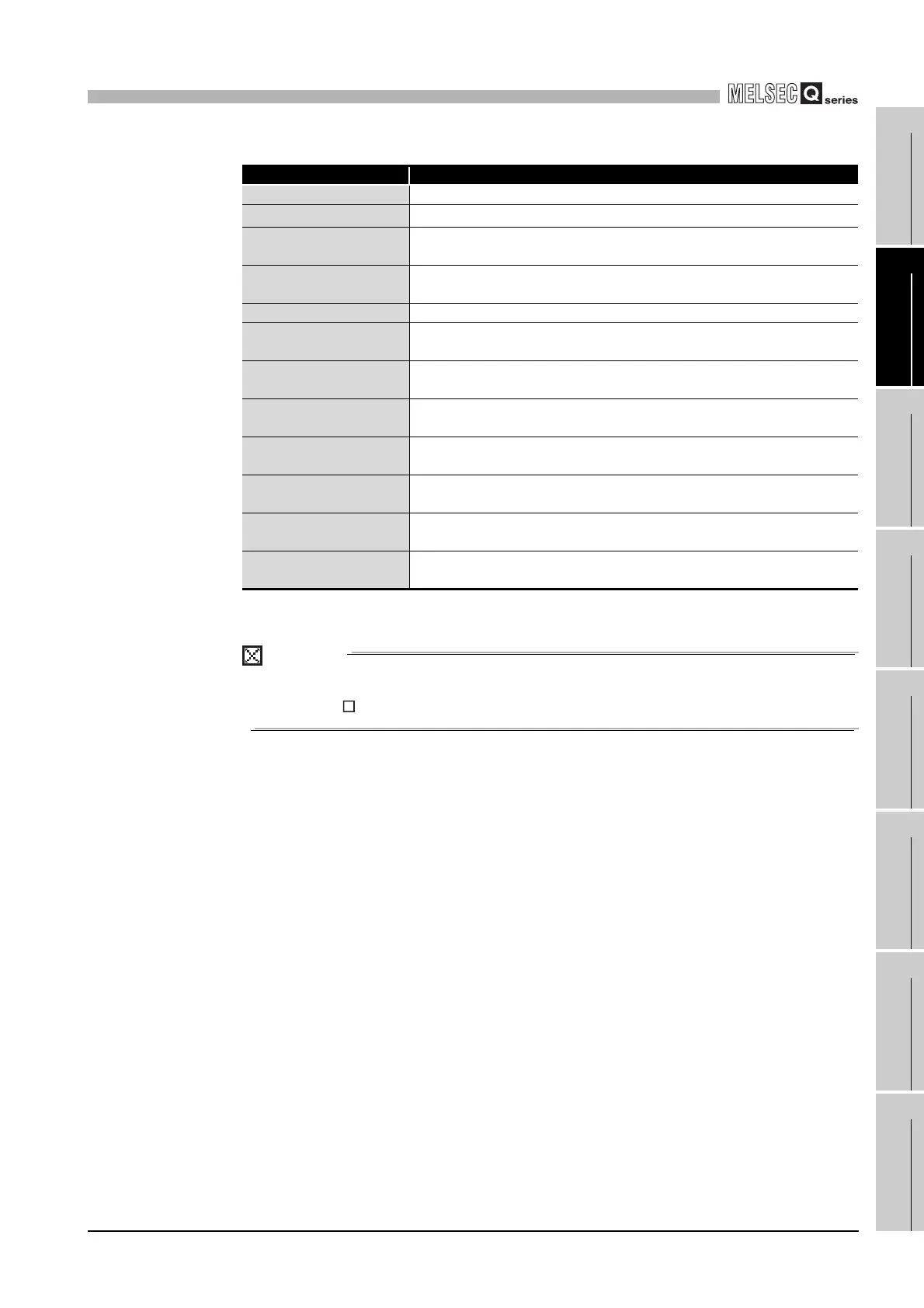
Table10.3 Bus interface function list (Continued)
Function name Function
QBF_ReadSRAM Read data from the battery backup RAM (the user area).
QBF_WaitUnitEvent
*1
Wait for the interrupt event notice from a module.
QBF_WaitEvent
*1
Wait for the interrupt event notice from QCPU (S.GINT instruction) / C Controller
module (QBF_GINT function).
QBF_GINT
Issue interrupt to the Motion CPU / C Controller module.
(Equivalent to S(P).GINT instruction of QCPU.)
QBF_ControlProgram Control the execution of a ladder program.
QBF_MotionSFCS
Request the Motion SFC program start.
(Equivalent to S(P).SFCS instruction of QCPU.)
QBF_MotionSVST
*1
Request the specified servo program start.
(Equivalent to S(P).SVST instruction of QCPU.)
QBF_MotionCHGA
Request current value change of the specified axis.
(Equivalent to S(P).CHGA instruction of QCPU.)
QBF_MotionCHGV
Request speed change of the specified axis.
(Equivalent to S(P).CHGV instruction of QCPU.)
QBF_MotionCHGT
Request torque limit value change of the specified axis.
(Equivalent to S(P).CHGT instruction of QCPU.)
QBF_MotionDDWR
*1
Write data to the Motion CPU devices.
(Equivalent to S(P).DDWR instruction of QCPU.)
QBF_MotionDDRD
*1
Read data from the Motion CPU devices.
(Equivalent to S(P).DDRD instruction of QCPU.)

 Loading...
Loading...





