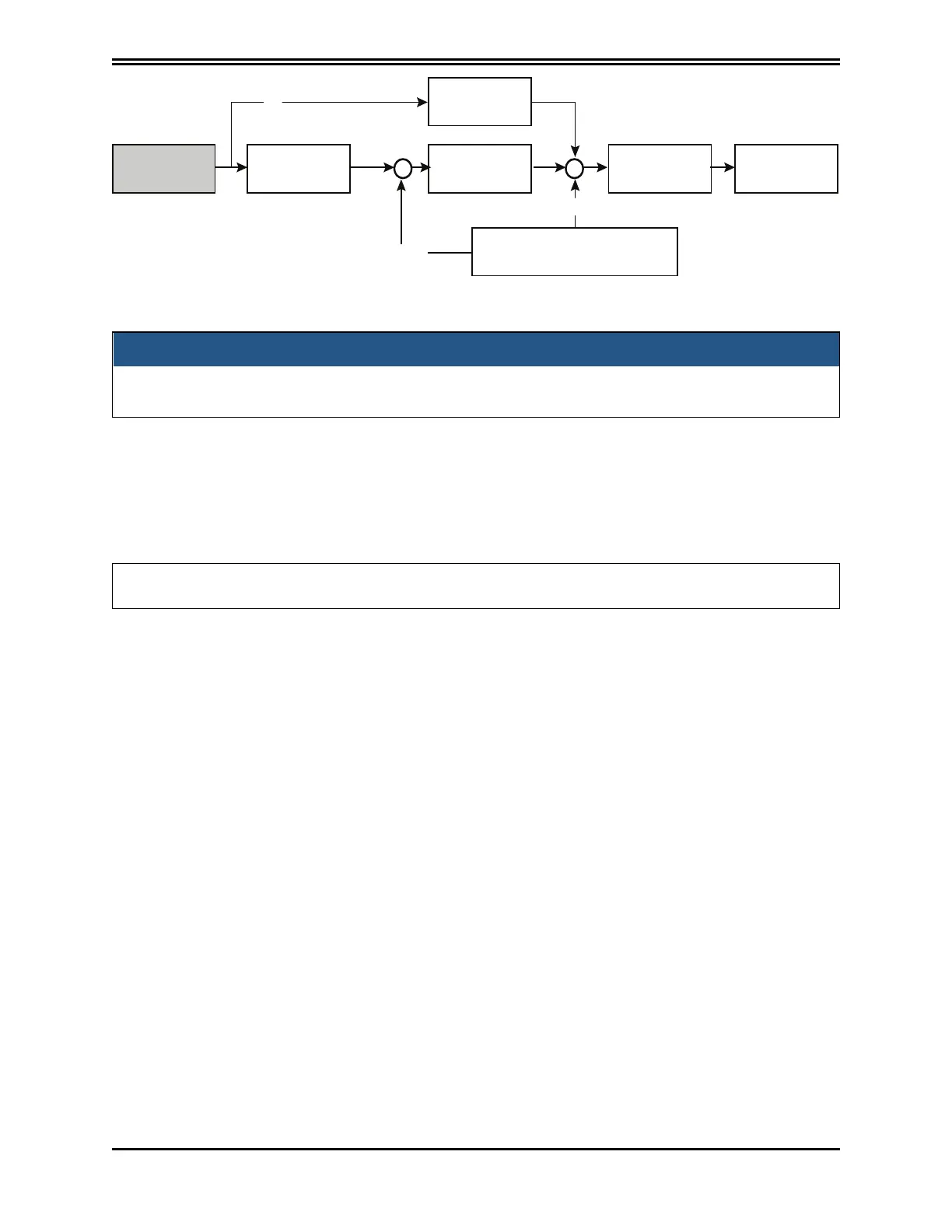
Feedforward
Position
Controller
Speed
Controller
Current
Controller
Micro
Interpolator
FSM
References
+
FF
Position
Speed
Retroaction
(Position and Speed)
−
Depending on the structure chosen, the reference for torque, speed or position must be provided.
Control loop settings must be adjusted by qualified personnel. Incorrect settings can adversely
affect motor performance.
6.4.5.2 Torque loop parameter configuration
The torque loop is the innermost. Parameters are assigned automatically starting with the motor setup
data with the menu Parameters Motor.
The user can configure the bandwidth of the closed loop of torque through the Terminal window. When
setting the variable 'bandPass', the possible values are 3000 (default), 2000, 1000, 600, 400 in Hz.
Changing the bandwidth from the default value may result in degraded motor performance.
6.4.5.3 Speed loop parameter configuration
The speed control must ensure that the motor speed follows, as closely as possible, the speed
reference, both in static conditions and in dynamic conditions. The quality of response of the system
depends on the loop parametrization.
The base rate is a PI (proportional-integral) type control with the addition of a feedforward control (ff_
calc) and a Saturation Variable (SAT_VARIABLE).
The proportional term provides an action as strong as the error is large, while the integral term (speed
error) corrects small errors that are maintained over time due to constant noise, allowing you to reach
the required target.
The Feedforward block minimizes the velocity error in cases of disturbances as they occur. This
contributes directly to the reference for speed processed by the PI controller, with the linear
combination of the speed references, acceleration, jerk, delayed speed of n samples, calculated at the
microinterpolator valley, and minimizes errors during transients.
The variable saturation block prevents the formation of a stationary axis position instability (zero
speed reference acting as a "low pass" filter with very limited bandwidth).
To set the parameters, from the Navigation Area, select "Speed loop". This opens a window that shows
the block diagram of the loop.
PN: L-MAM2-E-201
Moog Casella DM2020 Installation and Startup Guide
6.4.5.2 Torque loop parameter configuration
 Loading...
Loading...
