6.4.5.4 Configuration of the position loop parameters
The position control must ensure that the motor position follows, as faithfully as possible, the position
reference. The response quality of the system depends on the loop parameterization. The position
control is PID (proportional-integral-derivative).
l
The proportional term provides an action as strong as the error is large.
l
The derivative term notes if the error is increasing or decreasing the dampening behavior of the
system.
l
The integral term cancels the steady-state error.
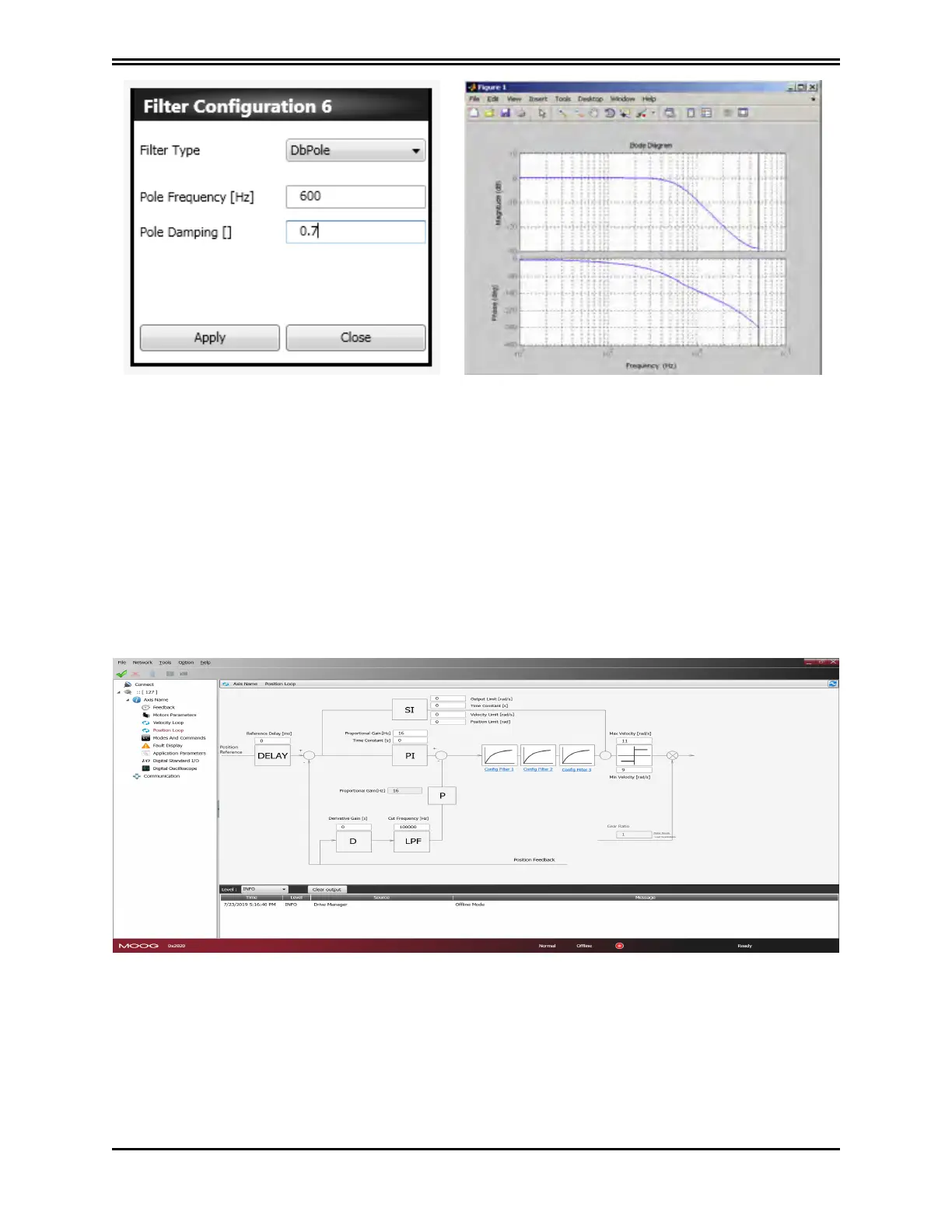
To set the parameters, from the Navigation Area select "Position loop": it will open the window
showing the loop diagram in question.
It recognizes the standard control loop (PID) characterized by four parameters. That is followed by a
sequence of filters that the implementation of more complex control structures. For parameterization
of the filters, see Filter configuration on page 103.
PN: L-MAM2-E-201
Moog Casella DM2020 Installation and Startup Guide
6.4.5.4 Configuration of the position loop parameters
 Loading...
Loading...
