Setting up Compax3 C3I22T11
184 192-120114 N5 C3I22T11 June 2008
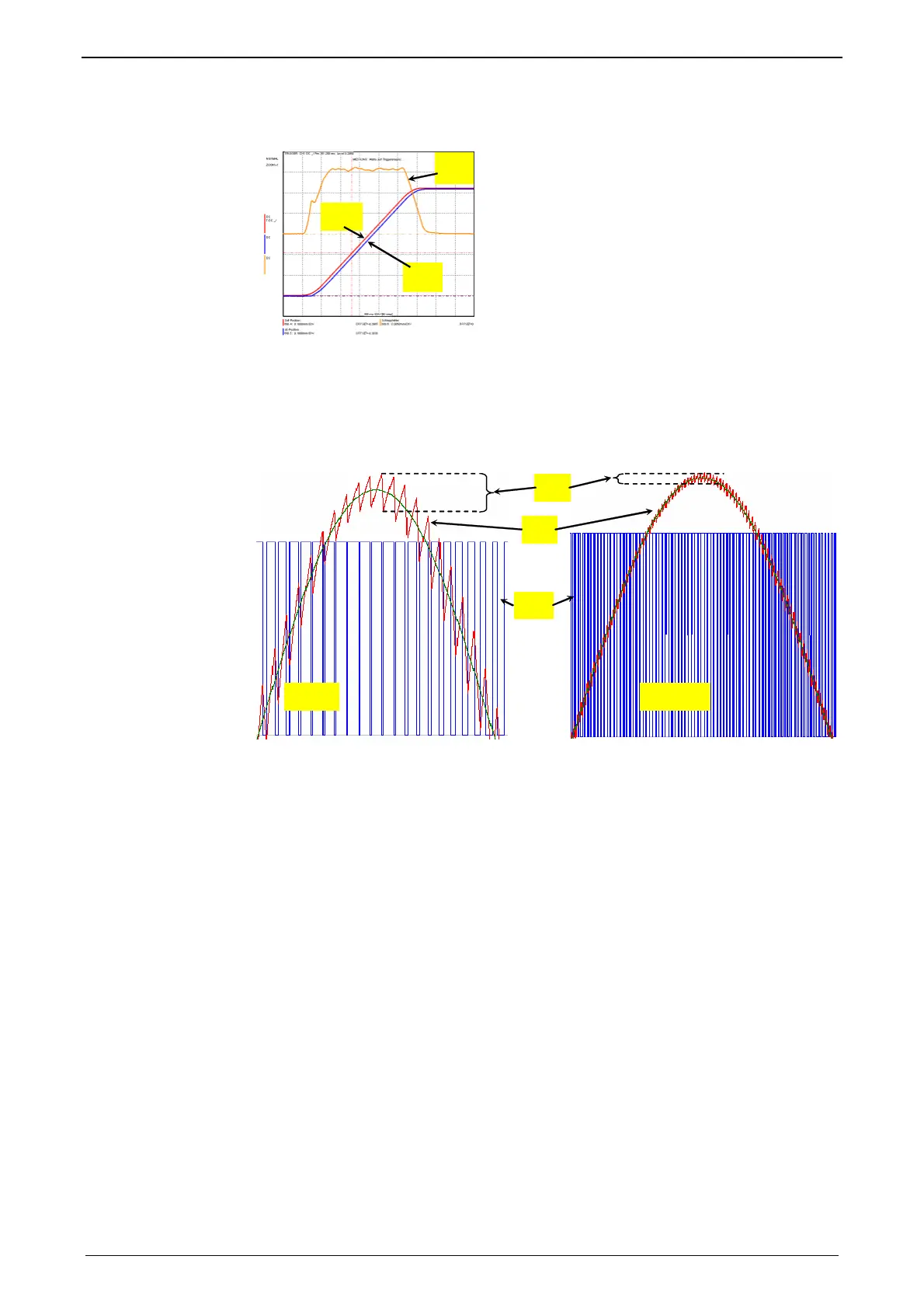
Following Error (Position Error)
Too high following error (position error) during a movement
3)
1)
2)
1) Setpoint Position
2) Position deviation = following error
3) Actual position
Reduction of the current ripple
Reduction of the current ripple of the phase current due to the higher switching
frequency
2
8kHz 32kHz
3
1
1: Current ripple
2: Phase current
3: PWM control
Please note that a high switching frequency means also high switching losses in
the power output stage of the controller. For this reason, you must consider dera-
ted data of the servo controller for the drive design with higher switching frequen-
cies.
Hint

 Loading...
Loading...










