Setting up Compax3 C3I22T11
186 192-120114 N5 C3I22T11 June 2008
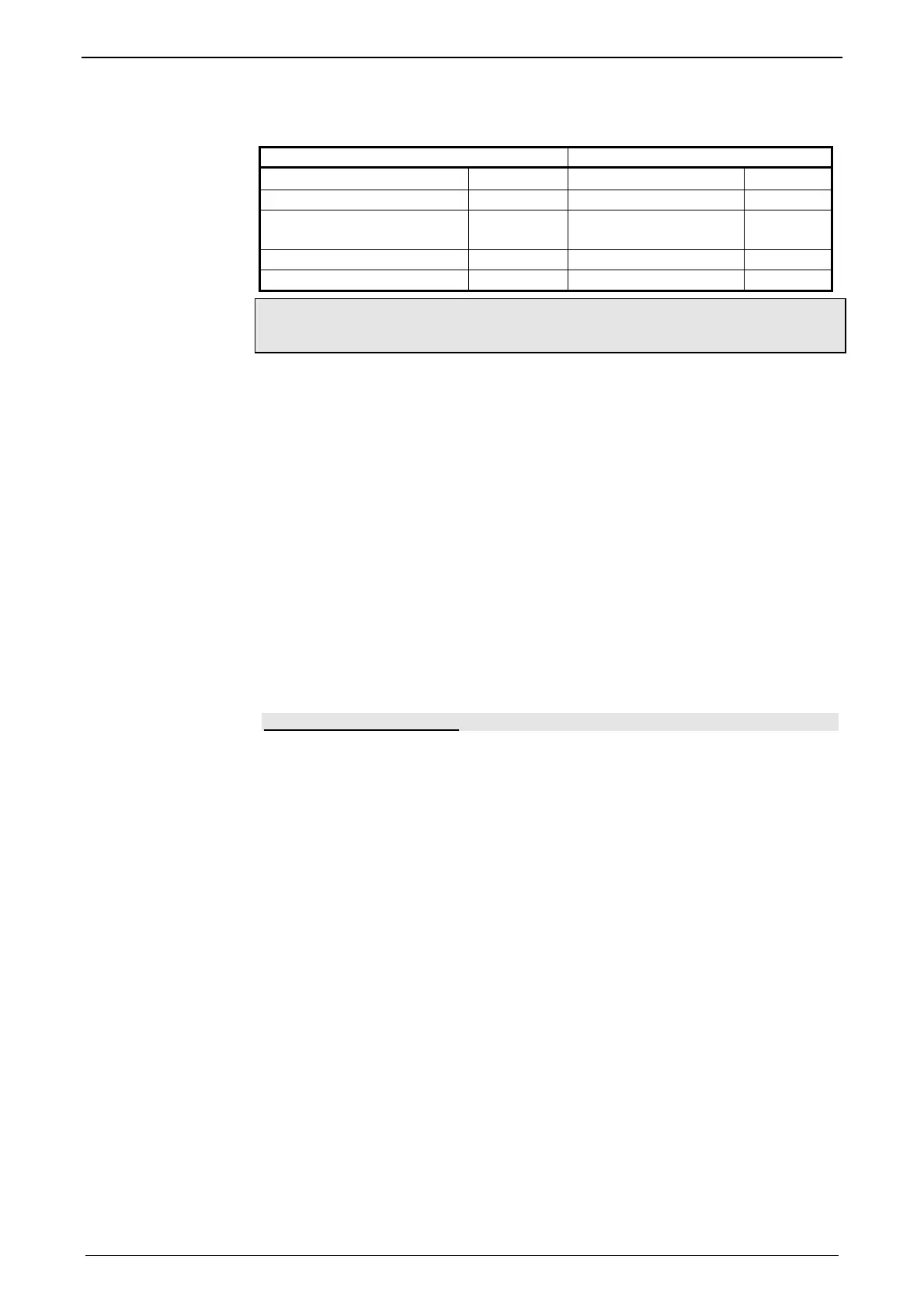
resp. the linear motion laws of physics. For this, the following analogies can be
established:
Rotary drive [unit] Linear drive [unit]
Travel x [rev] Path x [m]
Mass moment of inertia J [kgm²] Mass m [kg]
Velocity n
Angular velocity ω
[rps]
[1/s]
Velocity v [m/s]
Torque constant Kt [Nm/Arms] Force constant KF [N/Arms]
Torque M [Nm] Force F [N]
For reasons of clarity, we will in the following refer to the rotary motor, which
will represent both drive types.
An asynchronous motor is set up in the same way as a synchronous motor. The
only differences are varying motor parameters.
Changing the switching frequency and the reference point
The switching frequency and the reference point are activated in the ServoMana-
ger: "Motor reference point" wizard
A reference point differing from the nominal data may also be entered on the wi-
zard page displayed above.
Please activate "activate changing the reference point", then you may enter the
new reference velocity as well as the new reference current.
Motor reference point
A reference point differing from the nominal data may also be entered on the wi-
zard page displayed above.
Please activate "activate changing the reference point", then you may enter the
new reference velocity as well as the new reference current.
External Moment of Inertia
The external mass moment of inertia is set against the moment of inertia of the
rotor to form the total moment of inertia. The total moment of inertia is used for the
controller design.
If you do not know or have only a vague knowledge of the external mass moment
of inertia, the mass inertia can be determined via the load identification.
Configuration of an unknown external mass inertia:
The load identification is activated in the ServoManager:
Wizard "External moment of inertia" "unknown: using default values".
The correct values can be determined later via the load identification!

 Loading...
Loading...










