Setting up Compax3
C3I12T11
192-120113 N08 C3I12T11 - December 2010
Switching frequency of the motor current / motor reference point
In this chapter you can read about:
Following Error (Position Error) ...................................................................................... 186
Reduction of the current ripple ....................................................................................... 186
Motor parameters .......................................................................................................... 187
Changing the switching frequency and the reference point ............................................ 188
The higher the switching frequency, the better the quality of the current control. The
higher switching frequency reduces the dead time of the current control path as
well as the current control noise. Furthermore, thermal losses caused by current
ripple are reduced at higher switching frequencies.
Following Error (Position Error)
Too high following error (position error) during a movement
1) Setpoint Position
2) Position deviation = following error
3) Effective position
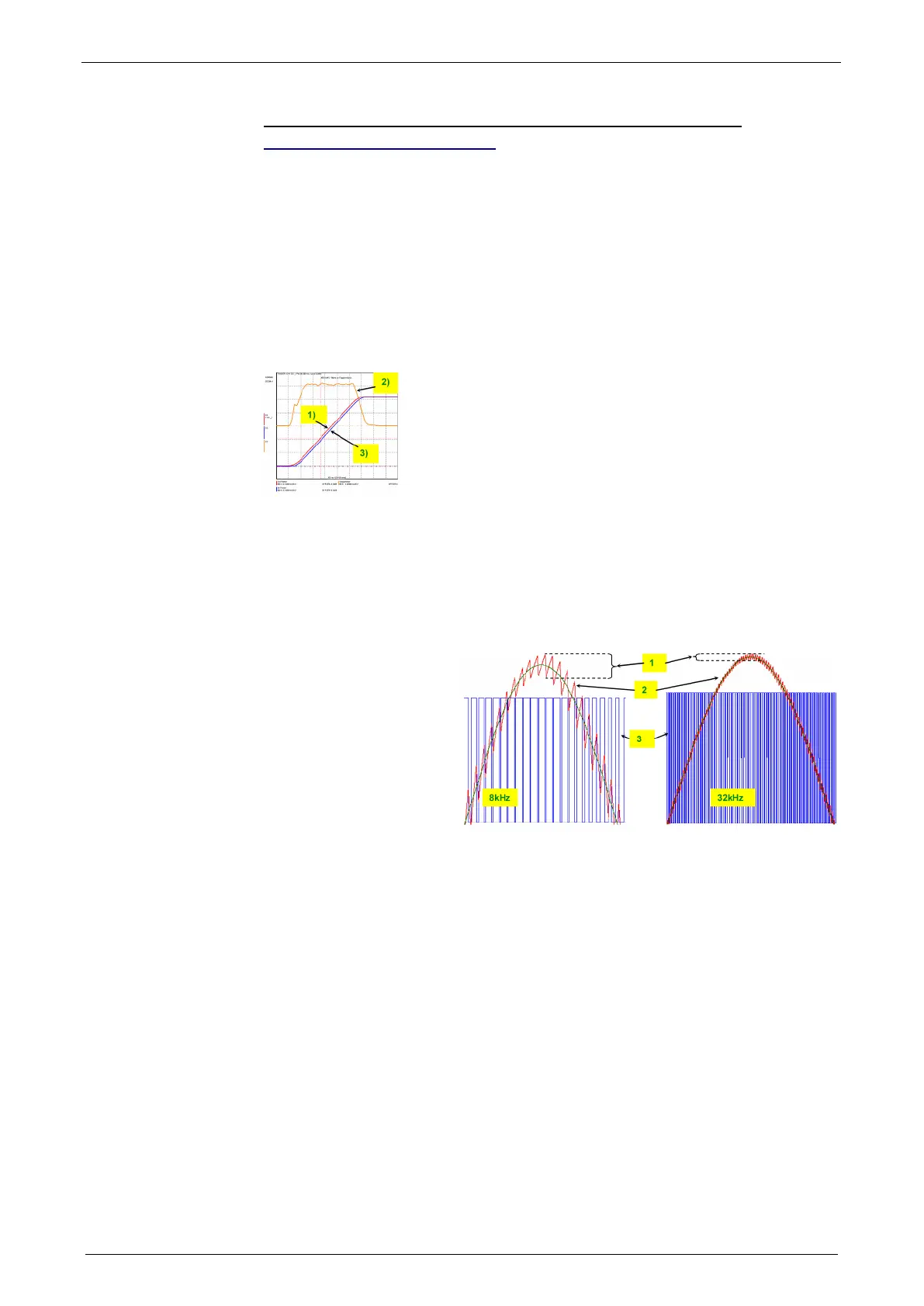
Reduction of the current ripple
Reduction of the current ripple of the phase current due to the higher switching
frequency
1: Current ripple
2: Phase current
3: PWM control
Please note that a high switching frequency means also high switching losses in
the power output stage of the controller. For this reason, you must consider
derated data of the servo controller for the drive design with higher switching
frequencies.