Startup Procedure and Test Run
4
4.6 Auto-Tuning
SIEPYEUOQ2A01G AC Drive Q2A Technical Manual 153
Table 4.12 EZ Tuning Mode Selection
Mode
Parameter
Settings
Application Conditions and Benefits
Applicable Control Method
(Value of A1-02 [Control Method])
Motor Constant T4-01 = 0
• For efficient operation of induction motors and PM motors.
• For derating torque applications, for example fans and pumps.
EZ Vector
(8)
Static R Autotune T4-01 = 1
• After Auto-Tuning, the wiring distance between the drive and
motor changed by 50 m or more.
• When the motor output and drive capacity are different.
EZ Vector
(8)
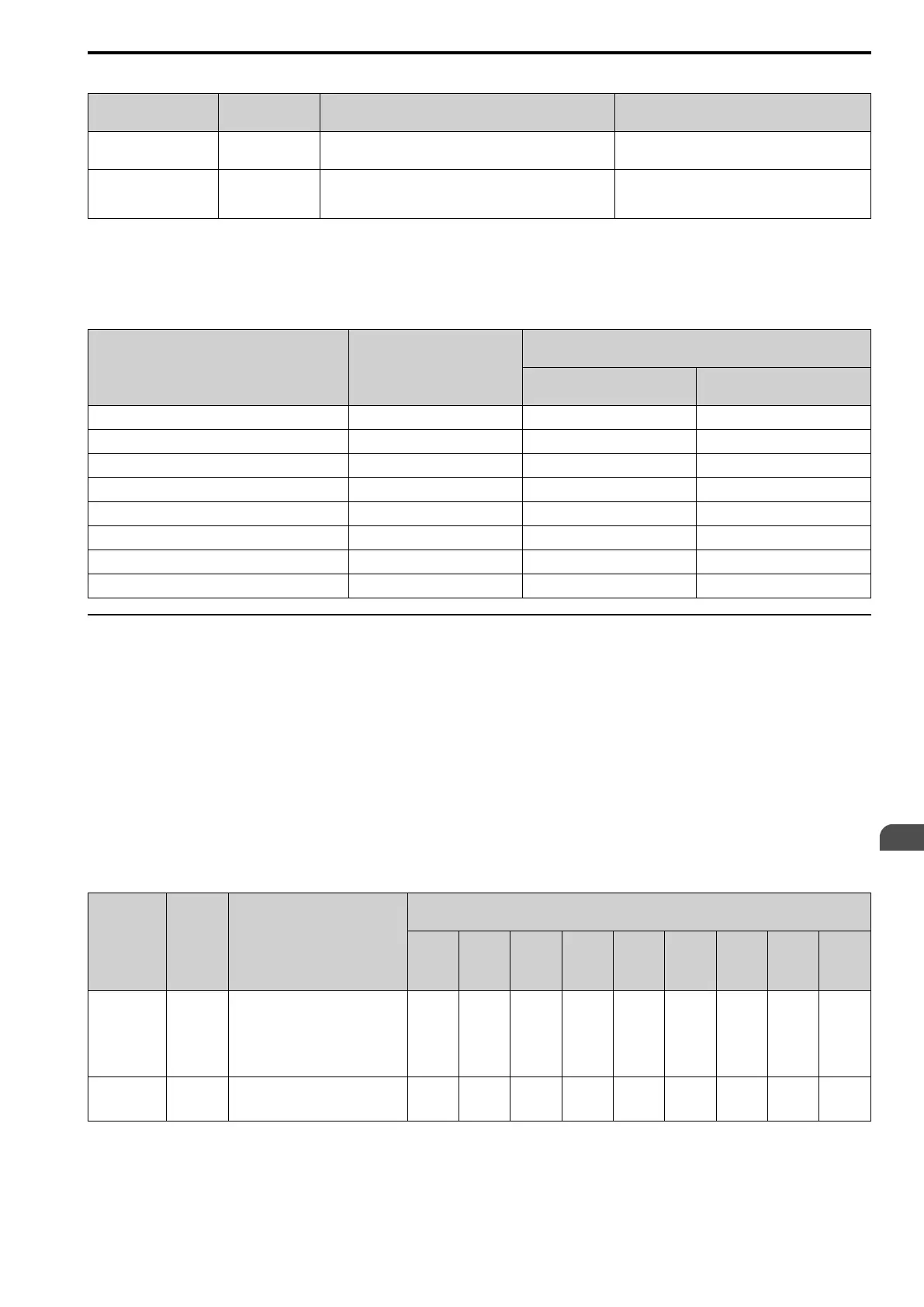
■ Input Data for EZ Tuning
To do Auto-Tuning, input data for the items in the following table that have an "×". Before starting Auto-Tuning,
prepare the motor test report or record the information on the motor nameplate as a reference.
Table 4.13 Input Data for EZ Tuning
Input Data Unit
Auto-Tuning Mode
(Value of T4-01 [EZ Tune Mode Selection])
Motor Constant
(0)
Static R Autotune
(1)
T4-02 [Motor Type Selection] - × -
T4-03 [Motor Max Revolutions] rpm × -
T4-04 [Motor Rated Revolutions] rpm × -
T4-05 [Motor Rated Frequency] Hz × -
T4-06 [Motor Rated Voltage] V × -
T4-07 [Motor Rated Current] A × ×
T4-08 [Motor Rated Capacity] kW × -
T4-09 [Motor Poles Number] - × -
◆ Control Tuning
To increase drive responsiveness and prevent hunting, use Auto-Tuning to automatically adjust the control-related
parameters.
These types of Auto-Tuning are available for the control system:
• Inertia Tuning
• ASR Tuning
• Deceleration Rate Tuning
• KEB Tuning
Note:
If you do Control Tuning, you cannot set any parameter of H1-xx = 61 [H1-xx: MFDI Function Select = Motor 2 Select]. Do not do
Control Tuning for applications that switch between motor 1 and motor 2.
Table 4.14 Control Loop Tuning Selection
Mode
Value of
Control
Loop Tune
Selection
Application Conditions and
Benefits
Applicable Control Method
(Value of A1-02 [Control Method])
V/f
Control
(0)
PG V/f
Control
(1)
OLVec
tor
(2)
CLVec
tor
(3)
Adv
OLVec
tor
(4)
PM
OLVec
tor
(5)
PM
AOLVec
tor
(6)
PM
CLVec
tor
(7)
EZ
Vector
(8)
Inertia Tuning 0
• For Feed Forward Control
• When L2-29 = 2 [KEB Method =
Single KEB2 Ride-Thru].
• When MFDI H1-xx = 42 [H1-xx:
MFDI Function Select = KEB
Thru2 NC].
- - - × - - - × -
ASR Tuning 1
To let the set response frequency
(including Inertia Tuning)
automatically adjust the ASR gain.
- - - × - - - × -