12.2 b: APPLICATION
582 SIEPYEUOQ2A01G AC Drive Q2A Technical Manual
■ b8-51 Standby Mode Wait Time
No.
(Hex.)
Name Description
Default
(Range)
b8-51
(0B01)
Standby Mode Wait Time
Sets the delay time before turning off the electromagnetic contactor after the drive stops.
600 s
(0 - 6000 s)
◆ b9: ZERO SERVO
Zero Servo is a position control function that stops and holds the motor shaft. The drive safeties the stopped motor
and an external force will not move the motor.
When you enable the Zero Servo function, the drive will save the home position. The drive can correct the motor
position and put the motor into the home position when the load rotates the motor.
To enable Zero Servo, set H1: DIGITAL INPUTS = 31 [Zero Servo]. The drive starts Zero Servo when the MFDI
terminal set for Zero Servo [H1-xx = 31] activates and the motor speed decreases to less than the value set in b2-
01 [ZSpd/DCI Threshold]. The drive stops and holds the motor in the Zero Servo start position. When Zero Servo
is enabled, the drive will hold the motor in position when the frequency reference increases to more than the value
set in b2-01. The drive accelerates to the frequency reference when the MFDI terminal set to trigger the Zero
Servo function is released and there is a Run command.
Note:
Zero Servo is available when A1-02 = 3, 7 [Control Method = CLVector, PM CLVector].
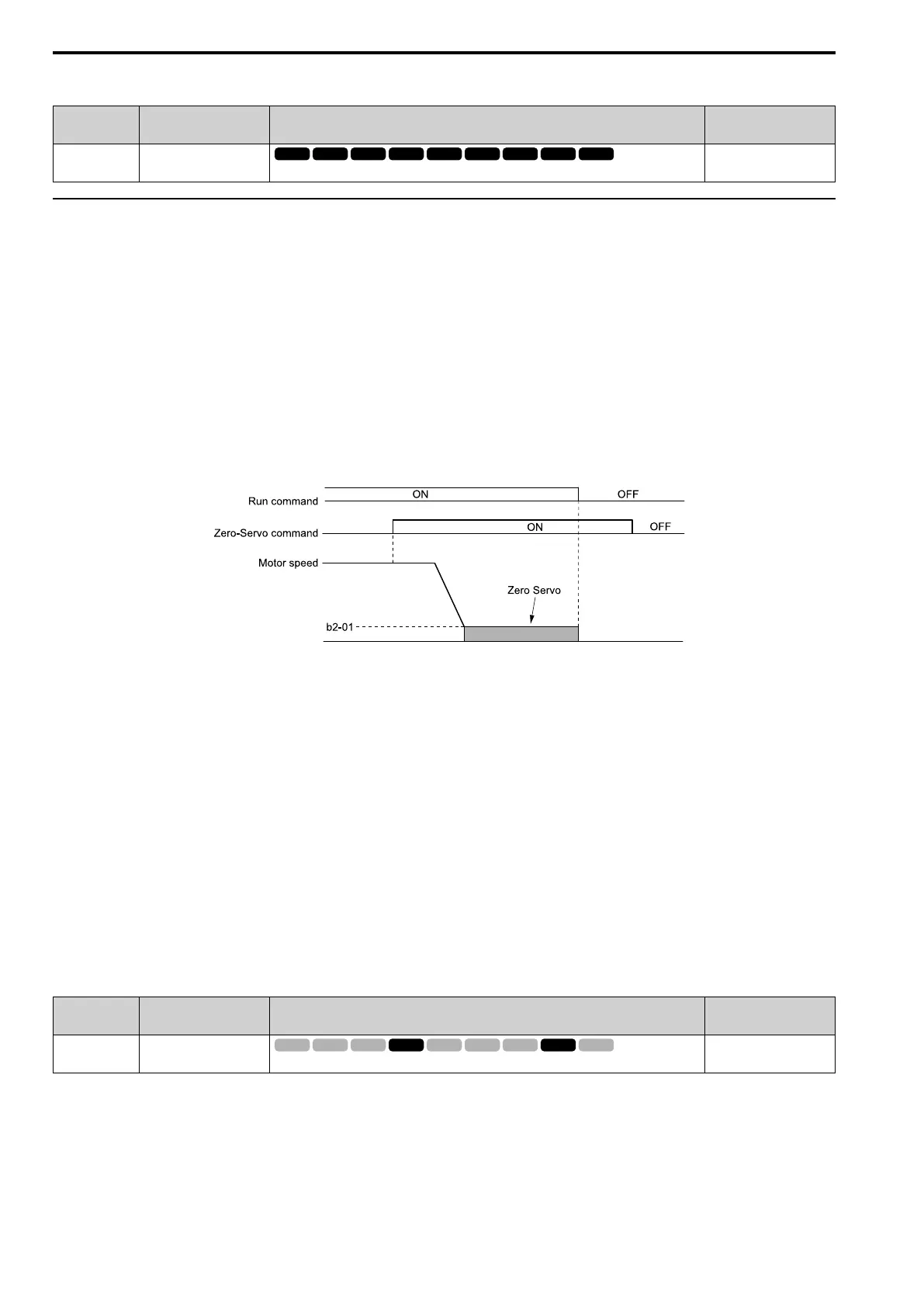
Figure 12.37 Zero Servo Time Chart
Monitor U6-22 [Pulse Move@Zero Servo] shows the difference between the position of the motor shaft and the
Zero Servo start position when Zero Servo is enabled. To find the difference, divide the number of pulses shown
in U6-22 by 4.
When the position of the motor shaft is in the range of “Zero Servo start position ± b9-02 [Zero Servo Width for
Completion]”, the drive will activate the MFDO set for ZeroServo ok [H2-xx = 8].
NOTICE: Do not let the Zero Servo function hold 100% load for long periods of time. When the application must use Zero Servo
to hold 100% load for long periods, operate in less than 50% of the drive rated output current or use a larger capacity drive.
Failure to obey will cause damage to the drive.
Note:
• When you use the Zero Servo function, keep the Run command ON. If the Run command is OFF, the drive will not hold the motor
shaft in position.
• When you turn oFF the Zero-Servo command, the terminal set for Zero Servo Complete will deactivate.
• If A1-02 = 7 [PM CLVector] and an external force rotates the motor during Zero Servo, the drive will detect dv4 [Inversion Prevention
Detection]. To prevent dv4 detection, increase b9-01 [Zero Servo Gain] or increase the number of pulses set in F1-19 [Dev4 Mode
Selection].
■ b9-01 Zero Servo Gain
No.
(Hex.)
Name Description
Default
(Range)
b9-01
(01DA)
Zero Servo Gain
Sets the responsiveness for the Zero Servo function.
0.5
(0.0 - 20.0)
If the drive is not responsive, or if there is too much deviation from the Zero Servo start point when you increase
the load, increase this setting. If oscillation or hunting occurs, decrease this setting.
Note:
• Set C5-xx [C5: ASR - SPEED REGULATION] parameters correctly before you adjust the Zero Servo gain.
• When you operate with the Zero Servo command enabled, oscillation and hunting must not occur.