Functional description
AG25, AG26 Date: 09.07.2018 Art. No. 88094 Mod. status 225/18 Page 16 of 109
4 Functional description
4.1 Control of the drive
The drive can be moved manually via the keys or digital inputs without upstream control. The
drive can be controlled and configured in the bus mode and via the service interface.
4.1.1 Operating modes
The following operating modes are distinguished: positioning mode and speed mode. In the
positioning mode there is the additional option of traveling in the inching mode. The position
control mode can be started via the digital inputs independent of the operating mode chosen.
4.1.1.1 Positioning mode
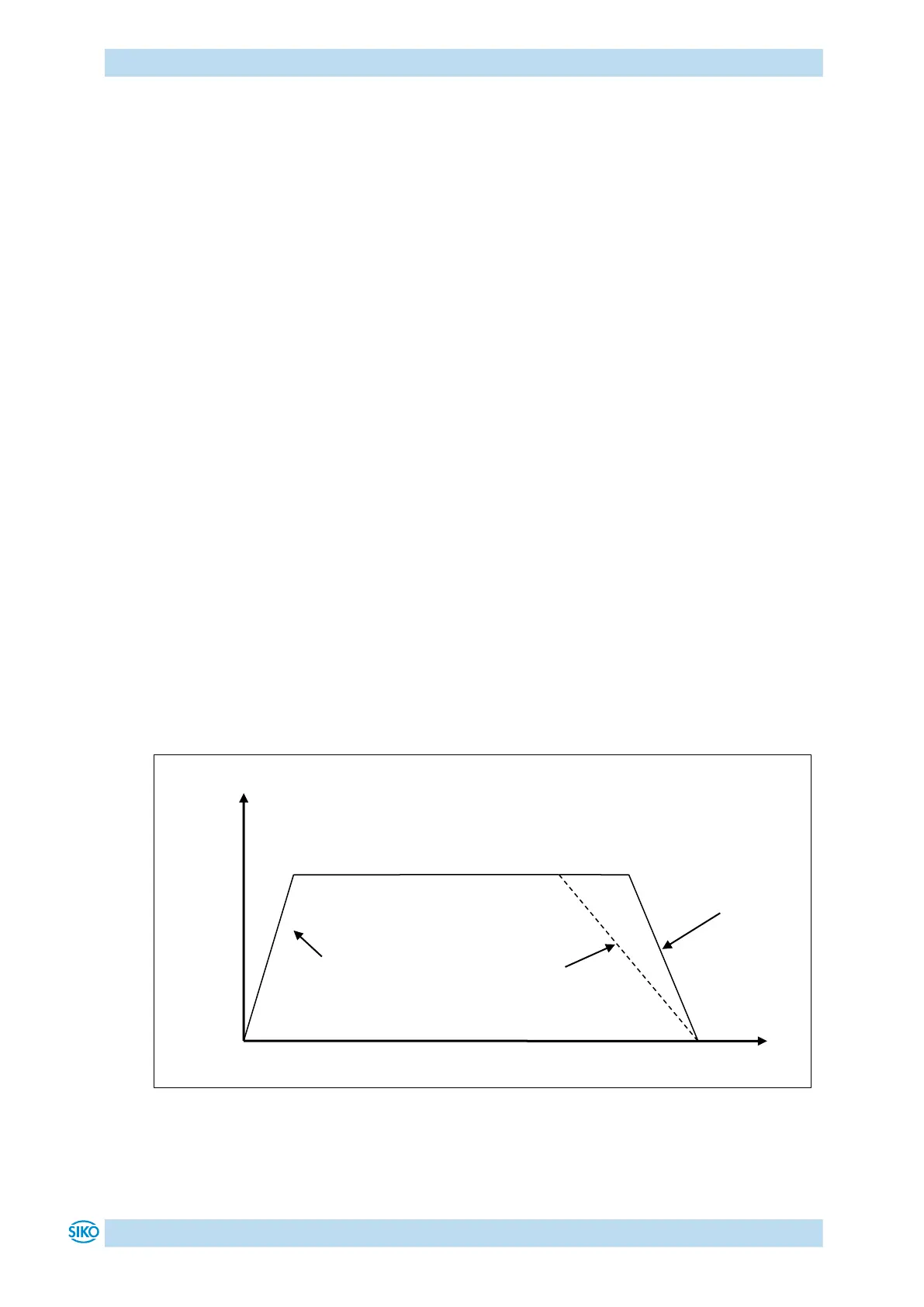
In the positioning mode, positioning to the specified set point is executed by means of a
ramp function (see Fig. 5: Ramp travel, direct positioning mode) calculated on the basis of
the actual position as well as the programmed controller parameters P (proportional factor), I
(integral factor), D (differential factor), acceleration and velocity.
Upon activation of the travel order, the actuator accelerates to the specified velocity with the
acceleration programmed. The measure of delay until reaching the setpoint is defined by the
parameter A-Pos (Object 2604h) as well.
Alternately, a value deviating from acceleration can be chosen for delay by means of
parameter D-Pos (Object 2606h).
Changing controller parameters during a positioning process does not influence the current
positioning operation.
Fig. 5: Ramp travel, direct positioning mode
The status word indicates whether the actual position is within the window defined by
parameter Pos Window (Object 260Ah). You can define the behavior of the actuator upon
reaching the programmed window via parameter Inpos Mode (Object 2616h).
(Object 2605h)
(Object 2604h)
(Object 2606h)
(Object 2604h)