EtherCAT®
AG25, AG26 Date: 09.07.2018 Art. No. 88094 Mod. status 225/18 Page 37 of 109
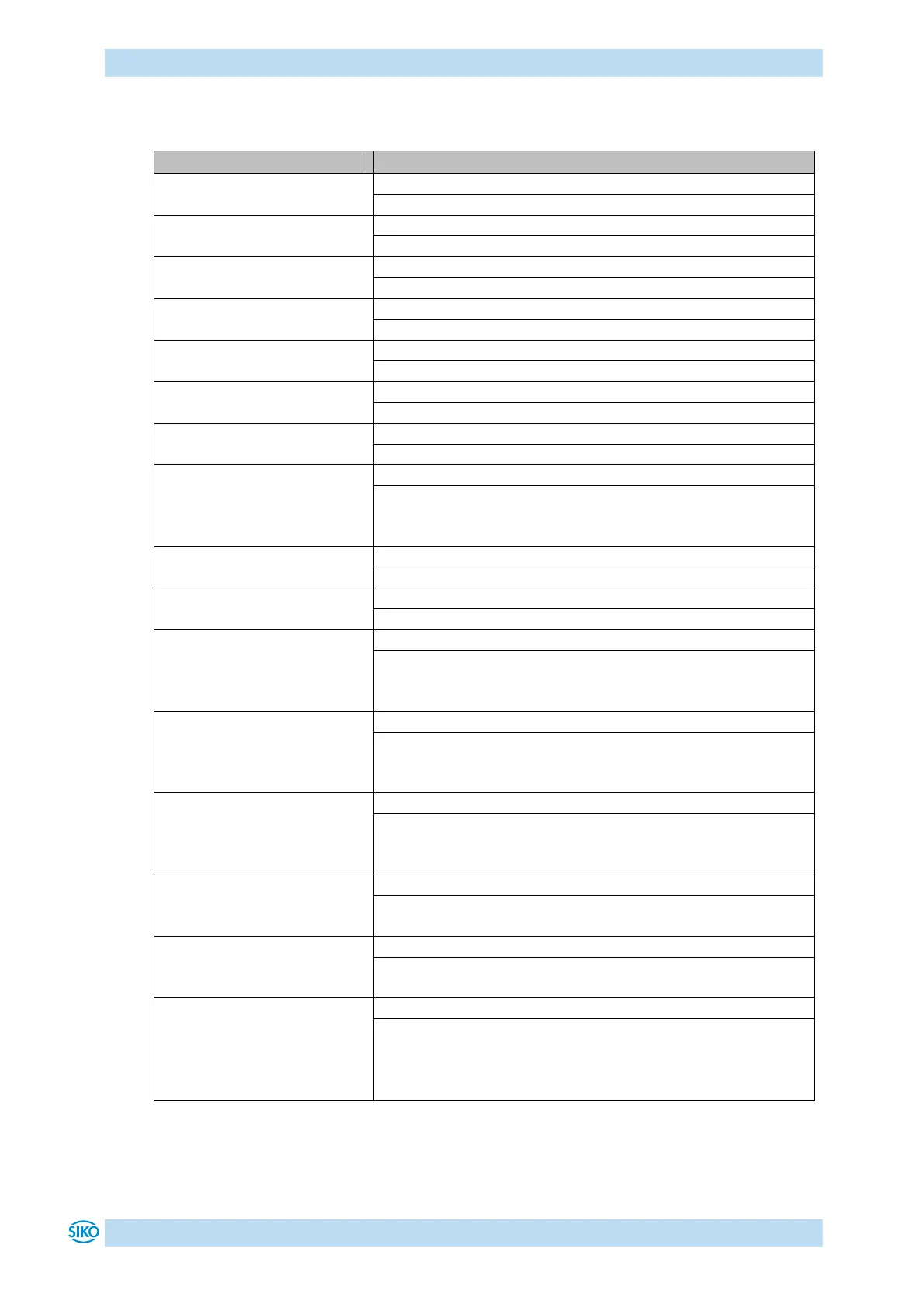
8.2.1.5.1 Status word: Positioning mode (slave master)
0 = Output stage supply voltage missing
1 = Supply voltage of the output stage is applied
Bit 1
Readiness to travel
0 = no violation of limit
0 = no violation of limit
Bit 4
Actuator travels/stands still
0 = actuator stands still
0 = actuator is outside the position window.
1 = actuator is inside the position window.
1 = error
Acknowledgment with positive slope on
Control word bit 5
0 = operation not enabled
Bit 10
Travel job acknowledgment
1 = acknowledgment
The bit is set when the travel job was accepted. If bit 4 is
reset in the control word, this bit will be reset as well.
0 = no warning, battery loading state is OK
1 = battery warning
Battery voltage is below 2.6 V.
Battery change is required.
0 = current limiting inactive
1 = current limiting active
Motor current exceeds the value set under parameter Current
Limiting (Object 2619h).
0 = Limit switch not active
1 = Limit switch active (configuration of a digital input
required, see chapter 4.1.3)
0 = Limit switch not active
1 = Limit switch active (configuration of a digital input
required, see chapter 4.1.3)
Bit 15
Calibration acknowledgment
1 = Acknowledgment
The bit is set when the calibration has been performed
successfully. If bit 15 is reset in the control parameter, this
bit is also reset.
Table 4: Status word of positioning mode